Diseño Geométrico F1
Diseño Geométrico
Nos vamos a la página de la FIA y descargamos las normas técnicas de la F1:
http://www.fia.com/en-GB/sport/regulations/Pages/FIAFormulaOneWorldChampionship.aspx
La forma y medidas del monoplaza están reguladas por las normas (de ahí que sean todos parecidos).
Hay zonas prohibidas, volúmenes donde no puede existir nada, por ejemplo:
Ejemplo zonas prohibidas del bodywork (carrocería), en 3 dimensiones:
y hay otras zonas permitidas, por ejemplo:
Geometric Design
We go to the website of the FIA and unload the F1 technical regulations:
http://www.fia.com/en-GB/sport/regulations/Pages/FIAFormulaOneWorldChampionship.aspx
The shape and dimensions of the car are regulated by the rules (hence they are all alike).
There are no-go areas, volumes where nothing can exist, for example:
Example prohibited areas of the bodywork (body), in 3 dimensions:
and other areas are permitted, for example:


Restricciones 3D

Además hay un montón de restricciones tipo: Motor de 8 cilindros y 2400 cc, medidas de diámetro y carrera, peso etc…
Modelamos el coche con todas las restricciones geométricas de la FIA y sale algo así:
Plus there are plenty of restrictions type: 8-cylinder engine and 2400 cc, bore and stroke measurements, weight, etc …
We model the car with all geometric constraints of the FIA and goes something like this:

Fondo Plano

F1 Diseño
here is also a lot of restrictions like: Engine 8 cylinders and 2400 cc, bore and strokemeasurements, weight etc …
We model the car with all the geometric constraints of the FIA goes something like this:
Dinámica F1, Dynamics
En el análisis despreciamos peraltes, pendientes, baches, pianos, dinámica de rotación de las ruedas, etc. y suponemos chasis rígido (indeformable), sin suspensiones…
Entre otras razones porque las fórmulas se complican bastante y perderemos la perspectiva ( un modelo debe introducir la mínima cantidad de complejidad a la vez que captura lo más esencial de la física relevante del fenómeno ).
Dado que nuestro sistema de coordenadas XYZ va ligado al asfalto, si tuviéramos en cuenta peraltes y pendientes, etc, todas las fuerzas tendrían tres componentes XYZ en lugar de 1 sola componente:
Por ejemplo, el peso mg (eje Z) tendría 3 componentes:
Z : mgz = mg * cos (per) * cos (pen)
Y : mgy = mg * cos (per)
X : mgx = mg * cos (pen)
Estas fuerzas actúan en el Centro de Masas.
Por efecto del cambio de pendiente se generarían fuerzas centrífugas en el eje Z que empujarían el coche contra el suelo o intentarían hacerlo despegar:
Z : Fcenz = m v^2 / Rrasante
Las Fuerzas centrífugas también actúan en el Centro de Masas.
La formulación no es compleja, pero el análisis para mejorar el monoplaza sí lo es.
Tampoco tenemos en cuenta la acción de los amortiguadores: nuestro coche es rígido y no habrá balanceos, ni cabeceos ni pivotamientos.
Aunque son muy importantes su estudio en conjunto con la dinámica del monoplaza implica un sistema de ecuaciones muy complejo para resolverlo de forma explícita.
Por tanto, en principio, hay que estudiar solo las fuerzas principales:

jasf1961 F1 Dinámica Básica Vehículos Monoplaza

Fuerzas en Recta
Dinámica
La adherencia depende de la Fuerza de Rozamiento, que responde a la fórmula
Froz = μ N siendo Froz, Fuerza de Rozamiento μ, Coeficiente de Rozamiento N, Fuerza Normal
En el caso de un Fórmula 1 tenemos cuatro ruedas que, en general y en un instante dado, tendrán distintos valores de μ y de N
FrozT = ∑ Frozi = ∑ μi Ni siendo FrozT, Fuerza de Rozamiento Total Frozi, Fuerza de Rozamiento de cada rueda
El Coeficiente de Rozamiento μi, para un sting, es función de los materiales en contacto Mat (goma-asfalto), de la Presión P, de la Temperatura T, de la Fuerza Normal N, del Desgaste D (que a su vez es función del tiempo t),…Para complicarlo un poco más, El Coeficiente de Rozamiento Instantáneo μi también depende de los ángulos de deriva o deslizamiento, de caída, de convergencia…
μi = f ( Mat, P, T, N, D f(t ) Ade, Aca, Aco,… ) ( El Coeficiente de Rozamiento μi lo calculamos en la sección Neumáticos Tyres)
La Fuerza Normal Ni es función, como veremos, de variables; masa m, Fuerza Lift FL, Fuerza Drag FD, Fuerzas de Inercia Fi, Fuerza Centrífuga Fcent y también es función de parámetros geométricos de diseño: batalla o Weelbase Wb (distancia entre ejes), Track Tr (distancia entre centros de ruedas del mismo eje), coordenadas del Centro de Masas Cm, coordenadas del Centro de Presiones Cp (de FL y FD),
Ni = f ( m, FL, FD, Fi, Fcent, Wb, Tr, Cm, Cp )
La Fuerza Normal de cada rueda Ni = f ( m, FL, FD, Fi, Fcent, Wb, Tr, Cm, Cp ), la calculamos por medio de las ecuaciones de la Dinámica:
∑ Fext = m*a dónde haremos Fi = m* a y la incluiremos dentro del sumatorio quedando ∑Fext – Fi= 0
∑ Mext = 0

Siendo:
hm, altura del Centro de Masas respecto al suelo
hp, altura del Centro de Presiones respecto al suelo
Tr, Track (distancia entre centros de ruedas del mismo eje medidos al centro de las ruedas)
Wb, Wheelbase (distancia entre ejes)
Wb = Wmr + Wmf siendo Wmr y Wmf las distancias horizontales del Centro de Masas a los ejes de las ruedas trasero (Rear, r) y delantero (Front, f)
Wb = Wpr + Wpf siendo Wpr y Wpf las distancias horizontales del Centro de Presiones a los ejes de las ruedas trasero (Rear, r) y delantero (Front, f)
Consideramos que el monoplaza está tomando una curva a derechas y está frenando.

En el caso que esté acelerando Fi cambia de signo.

F1 Acelerando
Tomando momentos respecto de las ruedas obtenemos las Fuerzas Normales Ni ( Nrl, Nfl, Nrr, Nfr ) en cada rueda:
Rueda Trasera (r, Rear) Izquierda (l, Left):
Nrl = (1/2*Wb) (mg*Wmf + FL*Wpf + FD*hp – Fi*hm) + Fcent (Wmf/Wb) (hm/Tr) Frozrl = μrl * Nrl
Rueda Delantera (f, Front) Izquierda (l, Left):
Nfl = (1/2*Wb) (mg*Wmr + FL*Wpr – FD*hp + Fi*hm) + Fcent (Wmr/Wb) (hm/Tr) Frozfl = μfl * Nfl
Rueda Trasera (r, Rear) Derecha (r, Right):
Nrr = (1/2*Wb) (mg*Wmf + FL*Wpf + FD*hp – Fi*hm) – Fcent (Wmf/Wb) (hm/Tr) Frozrr = μrr * Nrr
Rueda Delantera (f, Front) Derecha (r, Right):
Nfr = (1/2*Wb) (mg*Wmr + FL*Wpr – FD*hp + Fi*hm) – Fcent (Wmr/Wb) (hm/Tr) Frozfr = μfr * Nfr
Frenando interesa que FL ↑ FD ↑ mg ↓ Wmr / Wmf ↑ Wpr / Wpf ↓ hp ↑ hm ↓
Acelerando interesa que FL ↑ FD ↓ mg ↓ Wmr / Wmf ↓ Wpr / Wpf ↑ hp ↑ hm ↑
En Curva interesa que FL ↑ FD ↓ mg ↓ Wmr= Wmf= Wpr= Wpf= hp ↓ hm ↓ Tr ↑
En General interesa que FL ↑ FD ↓ mg ↓ Wmr / Wmf ↑ Wpr / Wpf ↑ hp ↓ hm ↓ Tr ↑
Damos prioridad a la frenada sobre la aceleración ya que en frenada se alcanzan valores de 5G (Fuerza G) = 5 * 9,8 m/s^2 = 50 m/s^2, mientras que en aceleración se llega a 1,5 G (Fuerza G) = 1,5 * 9,8 m/s^2 = 15 m/s^2 en la salida (limitado por el rozamiento) y para velocidades más altas es inferior a 1G < 10 m/s^2.
Y damos prioridad a la curva sobre la frenada y la aceleración ya que desestabiliza el monoplaza en sentido derecha – izquierda.
En general lo que es bueno para una situación, es malo para otra, excepto Tr, pero está limitado por la FIA.
Por tanto, lo mejor es lograr un buen equilibrio del coche, es decir que en todos los supuestos las Fuerzas Normales de cada rueda (y por tanto sus respectivas Fuerzas de Rozamiento) tengan valores similares.
Como la FIA no limita la distancia entre ejes, Wheelbase, aumentándola tendremos más sitio para recolocar componentes y adelantar/retrasar el Centro de Masa Cm e intentar bajarlo. Además podemos intentar estrechar el área frontal disminuyéndola y con ello reducir el valor de la Fuerza de Arrastre Drag Force FD, responsable de la velocidad máxima del monoplaza: FD aumenta con el cuadrado de la velocidad FD = f(v^2) y cuando se iguala a la fuerza del motor el coche no puede acelerar más y se alcanza la velocidad máxima.
A partir de la simulación CFD a v = 90 m/s calculamos FL y FD a la v que queramos (V = 80 m/s en este caso).
Introducimos el Radio de Curva y calculamos la Centrifugal Force.
Según el acelerador sacamos la potencia.
Según fuerza de frenado y diferencial las fuerzas a cada rueda. la aceleración del coche, etc.
Con todas las fuerzas conocidas, aplicamos las ecuaciones Σ Fext = m a = Fi (N) Σ Mext = I a = Mi (Nm)
teniendo en cuenta las transferencias de masas inerciales y calculamos las fuerzas normales en cada rueda Nz
y luego las fuerzas de rozamiento Froz i = μ i N i de cada rueda (los μ i los hemos calculado en la sección neumáticos).
Comparamos el Σ Fext i en cada rueda, tanto en dirección x como en y, con la Froz i de esa rueda para saber si esa rueda patina o no.
Si una rueda (p. e. la Dcha Trasera) patina en x (sentido de la marcha), vemos la posibilidad de que la otra rueda del mismo lado (Dcha Delantera),
sea capaz de absorber el sobrante de Σ Fext i o no.
Si una rueda (p. e. la Dcha Trasera) patina en y (sentido lateral), vemos la posibilidad de que la otra rueda del mismo eje (Izqda Trasera), sea capaz de absorber el sobrante de Σ Fext i o no.
Cuando hemos realizado todos los ajustes vemos si solo patina una rueda o varias o ninguna.
Cuando un F1 frena con algo de curva (curva de gran radio casi recta) es muy fácil bloquear una rueda ya que apenas tiene apoyo en esa rueda:
la normal Ni de esa rueda es muy pequeña y por tanto la Froz.
En este vídeo podéis ver lo que pasa al modificar los datos de la hoja de cálculo:
http://www.youtube.com/watch?v=4bywafYJbgY
Para simplificar el análisis no tenemos en cuenta pendientes ni peraltes (si los tuviéramos en cuenta el peso mg (eje z) también tendría componentes en los ejes x, y.
No lo hacemos para no perdernos (las fórmulas tendrían un par de sumandos más, eso no es problema, pero los árboles te impiden ver el bosque), ya que hay demasiados parámetros en juego y es complicado sacar conclusiones.
Tampoco tenemos en cuenta el efecto de las suspensiones y la flexión del chasis. Ambos son muy rígidos y no afectarán demasiado al análisis «a groso modo».
Si los tuviéramos en cuenta (se analizan en la sección Suspensiones), la fuerza normal de cada rueda sería un poco diferente en función del efecto de la suspensión:
* cuando la suspensión se comprime absorbe parte de dicha fuerza Normal (F = -kx) disminuyendo su valor (P.e. N pasa de 5000 N a 4500 N)
* cuando la suspensión se expande incrementa la fuerza Normal (F = -kx) aumentando su valor (P.e. N pasa de 5000 N a 5500 N)
Como las frecuencias de suspensión de los F1 rondan los 10 Hz (rebotan 10 veces en 1 segundo) es muy complicado saber en un instante dado que está haciendo el amortiguador (comprimiéndose o expandiéndose). Además hay baches y pianos…
Esta simplificación (coche rígido) nos permite transformar la ecuación vectorial de momentos Σ Mext = I α en Σ Mext = O ya que al no existir balanceos, cabeceos ni pivotamiento o guiñada sus respectivas aceleraciones angulares α serán nulas y se simplifica mogollón los cálculos.
Lo dicho simplificamos pendientes, peraltes, suspensiones y rigideces para ver si sacamos algo en claro, cosa que dudo.
Los fabricantes de coches y las escuderías no hacen estas simplificaciones y, aún así, los pilotos tienen que afinar el setup que teóricamente han calculado los ingenieros.
Al inicio esquema del planteamiento de las ecuaciones.
La masa del coche es función de la gasolina del depósito.
Las fuerzas aerodinámicas FL, FD las hemos calculado con simulación CFD (o túnel de viento si tuviéramos).
El radio de la curva se saca del circuito o por telemetría del giro del volante ( en recta el radio es infinito).
Según el piloto pise el acelerador => consumo de combustible (velocidad + marcha engranada => rpm del motor => potencia del motor + Relación de transmisión => Fuerza del motor en las ruedas traseras).
Según el piloto pise el freno (+reparto de frenada + diferencial autoblocante => fuerza de frenado en ruedas delanteras y traseras).
El coeficiente de rozamiento para el sting, μsting lo calculamos en Neumáticos Tyres y el instantáneo depende de la Fuerza Normal N, que calculamos aquí en un instante dado, también depende de la Temperatura instantánea del neumático, cosa que no calculamos (se haría con Termodinámica, complicado) y del ángulo de deriva, cosa que tampoco calculamos por su complejidad (se haría teniendo en cuenta la geometría de Ackerman).
Vamos a comparar dos prototipos Mod1 y Mod 2 poniendo todos los parámetros iguales (se pueden modificar todos los que queramos pero no sacamos ninguna conclusión). Aquí en este ejemplo se ha cambiado:
| Wmr (m)= | 1,300 | distancia horizontal del Centro de Masas al eje de las ruedas trasero | 1,600 | |||
Como siempre, en rojo los datos que podemos cambiar, el resto son fórmulas que se recalculan automáticamente:
jasf1961 word press Dynamics 1 Centro de masas y de presiones

jasf1961 word press Dynamics 2

jasf1961 word press Dynamics 3

jasf1961 word press Dynamics 4
Visualización del Mod 1:

jasf1961 word press Dynamics 5
Ejemplos de varias situaciones de carrera:
F1 Acelerando Recta Salida

jasf1961-Wordpress Dinámica F1 Acelerando Recta Salida

jasf1961 F1 Dinámica Recta vs Salida Acelerando
F1 Acelerando Recta v 70 ms-1

jasf1961-Wordpress Dynamics F1 Acelerando Recta v 70 ms-1

jasf1961 F1 Dinámica Recta Acelerando vs Velocidad
F1 Frenando Final Recta

jasf1961-Wordpress Dynamics F1 Frenando Final Recta

jasf1961 F1 Dinámica Recta vs Frenando
F1 Frenando Curva

jasf1961-Wordpress Dynamics F1 Frenando Curva

jasf1961 F1 Dinámica Curva vs Frenando
F1 Curva Velocidad Constante v 75 ms-1

jasf1961-Wordpress Dynamics F1 Curva Velocidad Constante v 75 ms-1

jasf1961 F1 Dinámica Curva vs Velocidad
F1 Acelerando Salida de Curva

jasf1961-Wordpress Dinámica F1 Acelerando Salida de Curva

jasf1961 F1 Dinámica Curva vs Acelerando
Vamos a comparar 5 monoplazas distintos que tengan todos los parámetros implicados iguales excepto
Wb = Wmr + Wmf y Wb = Wpr + Wpf
El análisis de Dinámica de Fluidos Computacional CFD se ha realizado a v = 90 m/s obteniéndose unos valores de
FL = 12500 N y FD = 8500 N.
Para otras velocidades se calcula con el análisis dimensional que predice que KL y KD permanecen constantes.
Para velocidad constante => a = 0 m/s^2 y vemos que se obtienen los mismos resultados “FRENANDO en curva” y “ACELERANDO en curva”
Aquí se comparan 5 Modelos en total (5 frenando + 5 acelerando):
En este ejemplo solo se ha modificado Wmf, distancia horizontal del Centro de Masas al eje de las ruedas delantero

- Dinámica Wheelbase 1

Frenando a 3G = 30 m/s^2 y acelerando a 5 m/s^2 a una v = 80 m/s en una curva de radio Rc = 250 m. Calculamos el Rc mínimo y la aceleración máxima:

- Dinámica Wheelbase 2

A v = 60 m/s y aceleraciones de 6 y – 6 vemos como ciertos modelos derraparían ya que necesitan un radio mayor:

- Dinámica Wheelbase 3

En fin, vemos en este caso diferencias apreciables en la rueda Delantera Izquierda de un monoplaza a otro:
| Rueda Delantera (f) | Izquierda (l, Left): | Rueda Delantera (f) | Izquierda (l, Left): | ||||||||||
|
Nfl |
5.177 |
4.488 |
4.046 |
3.794 |
3.188 |
Nfl |
4.798 |
4.109 |
3.635 |
3.344 |
2.692 |
||
|
μfl |
178% |
187% |
193% |
197% |
205% |
μfl |
183% |
192% |
199% |
203% |
212% |
||
|
Frozfl |
9.190 |
8.400 |
7.823 |
7.469 |
6.548 |
Frozfl |
8.772 |
7.909 |
7.237 |
6.794 |
5.715 |
||
Y el que más adherencia tiene es el 1º de WB =3,80 m (el más largo) y Wmr = 1,80 m (centro de gravedad más atrasado).
En esta curva puede ir más rápido, pero también castigará más este neumático que los otros monoplazas: lo que más interesa es ir rápido pero desgastando todos los neumáticos por igual dentro de lo posible, ya que excepto Suzuka que es un ocho, el resto de circuitos tienen casi todos sentido horario y por tanto se degradarán más los izquierdos que los derechos. Aun así, interesa que el delantero izquierdo y el trasero izquierdo se gasten por igual, para alargar la parada en boxes lo máximo posible (no sirve de nada tener tres en buen estado si el más solicitado lo tienes hecho polvo).
Estos cálculos en Excel están bien, pero la cantidad de supuestos (combinaciones de velocidades, aceleraciones, radios de curva y resto de parámetros) hacen tedioso sacar conclusiones. Para una curva a velocidad constante sirve, pero normalmente se entra frenando y se sale acelerando con trayectorias que podemos aproximar a una parábola. Al ir frenando/acelerando la velocidad instantánea cambia y hay que recalcular todos los parámetros, por ejemplo cada 0,1 segundos.
Partiendo del vértice de la curva 1 (v = cte) vamos acelerando hacia la salida, la trayectoria parabólica hace que el radio sea variable. Si en la simulación matemática nos salimos del circuito habrá que repetir el proceso con una aceleración menor para no salirnos ( la fuerza de rozamiento es un vector de dos componentes, de tal forma que si aumentamos una componente tenemos que disminuir la otra ya que la suma vectorial tiene el valor límite que estamos calculando. Dicho de otra forma: si gastamos la fuerza de rozamiento en la aceleración Fi = m * a (componente X en la dirección de la marcha) estamos disminuyendo la otra componente Y en sentido transversal a la marcha que es la que se opone a la fuerza centrífuga Fcent = m * v^2 / Rc. Para disminuir Fcent tenemos dos opciones: frenar (disminuir v) o aumentar Rc (nos salimos del circuito). Matemáticamente decimos que se tiene que cumplir
(Fi^2+Fcent^2)^0,5 < Froz . Al ir acelerando v1 va aumentando.
Para calcular la frenada es todavía peor, tenemos los mismos problemas anteriores y otro añadido: no sabemos cuándo tenemos que empezar a frenar. Lo solucionamos yendo “marcha atrás” como si estuviéramos rebobinando una cinta de video: partimos también del vértice de la curva 2 a v = cte vamos acelerando (con el valor de la aceleración de frenada que es muy superior en valor absoluto a la aceleración “marcha adelante” – la que proporciona el motor-). Es decir hacemos lo mismo que en el caso anterior, pero hacia atrás. También aquí v2 va aumentando.
Tenemos Curva 1 Recta 1 Curva 2
Si la Recta 1 es suficientemente larga como para alcanzar la velocidad máxima( recta de meta), ir un rato a esta vmax ( limitada por FD) y luego frenar, el problema está resuelto.
En caso contrario (recta pequeña, caso habitual) el punto donde hay que dejar de acelerar y empezar a frenar es aquel que donde las velocidades v1 y v2 se igualan. Es decir, al analizar la curva 2 rebobinando también vamos aumentando la velocidad. Tendremos que calcular el espacio Sp1 y Sp2, sumarlos y si coincide con la distancia entre ambos vértices de curvas 1 y 2, tenemos la solución. O sea, que tenemos que hacer los cálculos de ambas velocidades instantáneas v1 y v2 en paralelo, calculando los espacios Sp1 y Sp2 en paralelo y su suma. Si v1 < v2 iteramos para v1 hasta que v1 > v2, ahora v2 < v1, pues iteramos para v2 hasta que v2 > v1. Así hasta que el espacio entre vértices de curvas sea = Sp1 + Sp2. Sencillo ¿ no ?.
En la sección Motor Engine Design, hemos calculado la aceleración que proporciona el motor en función de la velocidad y la marcha engranada, que a su vez depende de la relación de cambio de marcha elegida. Además a baja velocidad dicha aceleración es superior al límite de la fuerza de rozamiento (las ruedas patinarían) con lo cual, debemos comprobar que Fi < Froz (si Fi > Froz limitamos Fi = Froz) . Acelerando Fi es la fuerza del motor Fmot en el siguiente cuadro, en el que se ha supuesto μroz = cte = 1,5 = 150% para no complicar los cálculos:

- Dinámica Wheelbase 4

Pero teniendo en cuenta la Dinámica, si calculamos el coeficiente de rozamiento μroz, en cada instante con las fórmulas previas, obtendremos los valores de μroz en función de los repartos de pesos. Mdd1 Cm centrado Mod5 Cm atrasado. En parado:

Fuerzas Normales y de Rozamiento en Parado
Acelerando, para el primer y quinto modelo, tendremos:
En la arrancada (v = 0 – 30 m/s = 108 km/hora) el Mod5 es claramente mejor al tener más carga en el eje trasero => más rozamiento (que limita la fuerza del motor útil en la tracción) => más aceleración. A partir de v =40 – 45 m/s la Fuerza del Motor es menor que Froz y no hay diferencias.
y frenando, para el primer y quinto modelo, tendremos:
Observamos que frenando, el Mod1 aventaja al Mod5 a alta velocidad y se van igualando a medida que ésta disminuye.
En la arrancada (v = 0 – 30 m/s = 108 km/hora) el Mod5 es claramente mejor al tener más carga en el eje trasero => más rozamiento (que limita la fuerza del motor útil en la tracción) => más aceleración. A partir de v =40 – 45 m/s la Fuerza del Motor es menor que Froz y no hay diferencias.
Simulando una carrera Mod5 en la arrancada hasta v = 60 m/s ganaría (6,08 – 5,25) = 0,83 segundos y (208,6 – 191,6) = 17 metros. A partir de aquí, si la velocidad no baja de 45 m/s los dos tienen igual aceleración, pero el Mod1 ganaría en cada frenada una media de + – 0,020 segundos y + – 0,40 metros, por lo que en unas 40 curvas le alcanzaría ( unas 4 vueltas ), siendo + – 0,2 segundos más rápido por vuelta, pero ¿podrá adelantarlo?
Decíamos que:
Frenando interesa que FL ↑ FD ↑ mg ↓ Wmr / Wmf ↑ Wpr / Wpf ↓ hp ↑ hm ↓
Acelerando interesa que FL ↑ FD ↓ mg ↓ Wmr / Wmf ↓ Wpr / Wpf ↑ hp ↑ hm ↑
Como las diferencias de Wpr / Wpf ( 31% – 26% = 5%) son menores que las diferencias de Wmr / Wmf (90%-32% = 58%) éste parámetro adimensional es más importante en esta simulación y por eso Mod5 es mejor en la arrancada y peor en las frenadas que Mod1.
Frenando interesa que Wmr / Wmf ↑ Mod1 con 90% gana a Mod5 con 32%
Acelerando interesa que Wmr / Wmf ↓ Mod5 con 32 % gana a Mod1 con 92%
Cálculo Motor MCIA MEC Cálculo del Motor F1
Cálculo del Motor, Design and Calculation Internal Combustion Engine ICE
Descarga programas EXCEL: Accede a estas direcciones y pincha el icono de descarga
Model Computational Simulation Calculation and Desing Internal Combustion Engine ICE Motor MACI MCIA MEC MEP Compresor Turbo:
https://drive.google.com/file/d/0B_W2GOYQoU8ienlORGwyM1ZOajg/view?usp=sharing
F1 motor 2012 https://drive.google.com/open?id=0B_W2GOYQoU8idlJpVDRCRkNuN00&authuser=0
F1 motor 2015 https://drive.google.com/open?id=0B_W2GOYQoU8iZ3VXQnVkUTU4Qm8&authuser=0

Instrucciones MCIA
Excel te permite tener los resultados del motor a distintos dosados y rpm en un pantallazo (güay) pero …
para visualizar mediante gráficos la evolución del ciclo del motor no sirve ….
necesitamos un lenguaje de programación: el BASIC es sencillo.
Sus versiones actuales se llaman QB64, Quick Basic 64 bits
Aquí van unos vídeos del programa ForcesMotorEdition QB Version 1.2.0.0 .bas
https://www.youtube.com/watch?v=i2EecSfSfBM
https://youtu.be/_UK1xBEQUzo
Descarga del archivo ForcesMotorEdition QB Version 1.2.0.0 .bas en lenguaje QBasic64:
ForcesMotorEdition QB Version 1.2.0.0 puede funcionar sin tener instalado QBasic
https://drive.google.com/file/d/1H1g5_yskdhMQNhFS4WdVj1_qYddodMOo/view?usp=sharing
https://drive.google.com/file/d/1VFJWuZQn9tEgnL-qxtcTW5gXevspEdeV/view?usp=sharing
ForcesMotorEdition QB Version V0.954 necesita tener instalado QBasic V0.954
https://drive.google.com/file/d/1EwtmRoXA4MzEl8Ns9Bi252qQDYBgx-w1/view?usp=sharing
Las siguientes figuras son del programa en EXCEL:

Estos son ejemplos de lo que hace la hoja de cálculo al iterar y cambiar las rpm:


Para diseñar un Motor Alternativo de Combustión Interna, MACI, y calcular sus prestaciones:
potencia, consumo y resto de parámetros nos basamos en la Termodinámica.
La Termodinámica, en general, tiene por objeto el estudio de las leyes de transferencia de calor
en sistemas en equilibrio.
Aplicaremos los principios a Sistemas Abiertos en un Volumen de Control.
Sistemas abiertos son aquellos que interaccionan con el medio exterior, a través de la pared cerrada
que los limita, mediante flujos de materia y/o energía.
Analizaremos el Ciclo Otto (motor de gasolina) como si el fluido (aire + combustible) fuera un Gas Ideal.
Supondremos que todas las transformaciones son reversibles.
Una transformación termodinámica es reversible cuando las magnitudes macroscópicas que la
caracterizan están, en cada instante, en la posición de equilibrio termodinámico o infinitamente próximas a él.
To design a motor and calculate its performance: power consumption and other of parameters we rely on thermodynamics.
Thermodynamics, in general, aims to study the heat transfer laws in equilibrium systems.
Will apply the principles in Open Systems Control Volume.
Open systems are those that interact through the closed wall which limits, flows material and / or energy, with the external environment.
Analyze the Otto cycle (petrol engine) as if the fluid (air + fuel) was an Ideal Gas.
We assume that all transformations are reversible.
A reversible transformation, is one for which the macroscopic quantities that characterize at every moment, are in thermodynamic equilibrium position or infinitely close to it.



Aplicaremos los principios de la Termodinámica:

Formulas Termodinamicas
Tendremos en cuenta:
Energía que añadimos al sistema: la aportación de energía de la gasolina.
Energía que sale del sistema: la que se va con los gases de escape y la refrigeración.
Además, habrá perdidas mecánicas debidas a:
* pérdidas debidas a elementos auxiliares: bomba de refrigeración, alternador,… y si hubiere (bombas de dirección asistida o servodirección, de frenos,…, compresor para aire acondicionado/climatizador, compresor volumétrico para motores sobrealimentados, etc). Nótese que el turbocompresor apenas reduce el rendimiento ya que aprovecha la inercia de los gases de escape (apenas, ya que teóricamente no reduce el rendimiento aunque en la práctica reduce la velocidad de los gases de escape y por ende aumenta su presión con lo cual el vaciado de los gases de escape se ve perjudicado, si bien el resultado global es positivo).
* al rozamiento (pistón, cilindro, cigüeñal, gearbox, transmisión,…), que se disipan en forma de calor y pérdidas en la admisión, compresión, expansión y escape ya que todo proceso real lleva pérdidas intrínsecas al no ser un proceso perfecto ( isentrópico, cuasiestático,…) como un modelo matemático que se utiliza para el estudio.
En resumen, el rendimiento total del motor η, será:
η = Energía Mecánica Obtenida / Energía Combustible Aportado
Cálculo del ciclo Otto como Gas Ideal
Analizamos un ciclo mediante transformaciones politrópicas, teniendo en cuenta las pérdidas de calor.
Motor de Combustión Interna Alternativo, MCIA.
Motor de Encendido Provocado, MEP
Motor de Encendido Controlado, MEC
Motor de Encendido por Compresión, MEC: el comburente sufre una fuerte compresión tal que al inyectarse el combustible la mezcla se autoinflama.
Motor de Aspiración Natural o Atmosférico.
Los procesos reales que tienen lugar en los motores de combustión interna alternativos (MCIA) son demasiado complejos para poder realizar un análisis completo de los mismos.
Es necesario acudir a modelos matemáticos simplificados que ayuden a comprender la esencia de los mismos.
Las ecuaciones que nos proporciona la Mecánica son exactas.
Las ecuaciones que nos proporciona la Dinámica serán exactas si tenemos modelado el motor con un software CAD.
Las ecuaciones que nos proporcionan la Dinámica de fluidos y la Termodinámica no son exactas:
-
Si el modelo es cero-dimensional los resultados serán aproximados.
-
Si el modelo es multidimensional y modelamos con software CAD y CFD mejoraremos los resultados.
Modelar con CAD y CFD, implica muchas horas de trabajo.
Dado que la cantidad de parámetros que definen el rendimiento de un motor son elevados, lo más eficiente es simularlo a grosso modo con un modelo cero-dimensional y pulir el diseño con un modelo multidimensional.
En los modelos cero-dimensionales las variables Presión y Temperatura son función del tiempo t, pero no del espacio: P(t) T(t)
No se modela el flujo y, por tanto, no pueden predecir ninguna característica del movimiento del fluido relacionada con la geometría del motor.
Tienen la ventaja de que no hace falta diseñar el CAD.
Para calcular el rendimiento, potencia y resto de parámetros suele ser suficiente con un modelo cero-dimensional.
Para calcular las zonas donde se alcanzan las máximas temperaturas y presiones y así poder evaluar el stress de los materiales empleados con más precisión es mejor un modelo multidimensional.
En los modelos multidimensionales las variables dependen también de la posición (=> CAD) y obliga a trabajar con las complejas ecuaciones en derivadas parciales de Navier-Stokes (además de las complicadas ecuaciones termodinámicas del proceso de combustión).
Es preciso resolverlas con software CFD, en donde se toman en cuenta los efectos tridimensionales debidos a la geometría de la cámara de combustión.
Tienen la ventaja de que son más precisos.
Además de los parámetros geométricos (diámetro del pistón, carrera, relación de compresión, longitud de la biela,…) la transferencia de calor y la duración de la combustión son fundamentales en el análisis del rendimiento del motor.
Como la transferencia de calor por convección, radiación y escape es muy difícil de cuantificar la mayoría de modelos se apoyan en coeficientes experimentales distintos para cada motor, y aquellos que modelan la radiación son propensos a cometer grandes errores, ya que ésta depende de la cuarta potencia de la temperatura (un pequeño error de temperatura ocasiona un gran error de calor por radiación).
Para la duración de la combustión sucede lo mismo: complicadas fórmulas con coeficientes experimentales.
El presente modelo en EXCEL es cero-dimensional (no precisa CAD ni CFD): P y T uniformes en el espacio.
- La transferencia de calor, debida a la refrigeración, se calcula por convección, basándose en el espesor de la pared del cilindro, EsCi que depende, por resistencia de materiales, de la Presión máxima del gas, del Diámetro del Pistón y de la Tensile Yield Strength del material de que está compuesto: EsCi = P*r/TYSTA
A su vez la Presión máxima del gas depende del turbo, del compresor volumétrico y de la relación de compresión, Rc_:
EsCi = 30*Po*(1+Rtg)*Rvc*Rc_*0,5*Dp/TYSTA
- La transferencia de calor, debida al escape, se calcula en base a la velocidad de salida del gas (Bernouille), la masa que sale (continuidad) y su pertinente energía: ΔǬesc = Δṁesc Cv ( Tgas – To)
- La duración de la inyección depende de la presión de la bomba de inyección, de parámetros geométricos del inyector y de la cinética del combustible: Vsiny=CoDi*(2*(γ/(γ-1))*(1-(Pgasmax/(2*Piny))^((γ-1)/γ))*Piny/ρg)^0,5
Los tres procesos cuentan con un coeficiente para ajustar los resultados:
- la refrigeración CoCon = 100% Coeficiente de Conductividad Modificable por el usuario
- el escape CoDe = 19% Coeficiente Descarga Válvula 1,45*LeVa/DiVa
- la inyección CoDi = 30% Coeficiente Descarga Inyector Modificable por el usuario
La relación entre el trabajo obtenido y la energía suministrada es el rendimiento η.
η = W (J) / [mc (kg) * Pc (J/kg)] = Ẇ ![]() / [mc (kg) * Pc (J/kg) / t (s)] = Ẇ
/ [mc (kg) * Pc (J/kg) / t (s)] = Ẇ ![]() / [ṁc (kg/s) * Pc (J/kg)]
/ [ṁc (kg/s) * Pc (J/kg)]
La Energía Aprovechable E (J), Calor Q (J), Trabajo W (J), Potencia Ė (w), Ǭ (w), Ẇ ![]() va disminuyendo
va disminuyendo
- Combustible [mc (kg) * Pc (J/kg)] [ṁc (kg/s) * Pc (J/kg)]
- Reacción Química [mc (kg) * Pc (J/kg)] * ηquí [ṁc (kg/s) * Pc (J/kg)] * ηquí
- Interior Cilindro [mc (kg) * Pc (J/kg)] * ηquí * ηind [ṁc (kg/s) * Pc (J/kg)] * ηquí * ηind
- Cigüeñal [mc (kg) * Pc (J/kg)] * ηquí * ηind * ηmec [ṁc (kg/s) * Pc (J/kg)] * ηquí * ηind * ηmec
- Ruedas [mc (kg) * Pc (J/kg)] * ηquí * ηind * ηmec * ηtra [ṁc (kg/s) * Pc (J/kg)] * ηquí * ηind * ηmec * ηtra
La energía aprovechable va disminuyendo debido a que:
ηquí, la reacción química no es perfecta
ηind , la energía calorífica solo se convierte parcialmente en energía mecánica (termodinámica).
ηmec, pérdidas debidas a fugas, rozamientos.
ηtra, pérdidas debidas a la transmisión
Pérdidas de energía en forma de calor al tener que refrigerar el motor, calor que se va con los gases de escape.
Pérdidas debidas a la bomba de circulación del refrigerante, compresor en motores sobrealimentados, compresor del aire acondicionado, ídem para servodirección, servofrenos, etc. (si los hubiere).
Ganancia de energía si hay turbocompresor que aprovecha parte de la energía de los gases de escape, intercooler que enfría el aire en la admisión, …
La energía y potencia indicadas debidas a la Fuerza de Expansión, Fp exp de los gases en el cilindro (pistón) son:
W (J) = Σ dW (J) = Σ Fp exp (N) * dx (m) = Σ P (Pa) * Ap (m2) * dx (m) = Σ P (Pa) * dV (m^3)
Ẇ ![]() = Σ d Ẇ
= Σ d Ẇ ![]() = Σ dW (J) / dt (s) = Σ Fp exp (N) * dx (m)/ dt (s) = Σ Fp exp (N) * v (m/s)
= Σ dW (J) / dt (s) = Σ Fp exp (N) * dx (m)/ dt (s) = Σ Fp exp (N) * v (m/s)
Ẇ ![]() = Σ P (Pa) * Ap (m2) * dx (m) / dt (s) = Σ P (Pa) * Ap (m2) * v (m/s) = Σ P (Pa) * dṼ(m^3/s)
= Σ P (Pa) * Ap (m2) * dx (m) / dt (s) = Σ P (Pa) * Ap (m2) * v (m/s) = Σ P (Pa) * dṼ(m^3/s)
La fuerza total en el pistón es la suma de la debida a la expansión por la presión del gas más la inercial:
Fp = Fp exp + F iner
Al transformar el movimiento rectilíneo alternativo del pistón en movimiento circular, la Fuerza tangencial en la manivela del cigüeñal será:
F tang man (N) = Fp * cos γ/ cos β = Fp * cos ( 90º – φ – β )/ cos β (N)
Siendo el Par Motor: Pm (Nm) = F tang man (N) * Rman (m) = Fp (N) * vp (m/s) / w (rd/s)
Si W y/o Ẇ los calculamos por el ciclo Otto hablaremos de η termodinámico ciclo Otto como Gas Ideal
Normalmente se calculan a la salida del motor, es decir en el cigüeñal. Si no se han calculado pérdidas por rozamientos, habrá que restárselas.
También hay que restar las pérdidas debidas a bombas, comprensores, etc. Y las debidas a la trasmisión hasta las ruedas …
CALCULOS PRELIMINARES: Cilindrada, Relación de Compresión, Relación Biela/Manivela, Dosado, Rendimiento Volumétrico, etc….
Hacemos una hoja de cálculo en Excel que nos permite visualizar los resultados al modificar un dato (o una fórmula cuando estamos programando).
Analizamos un ciclo mediante transformaciones adiabáticas y teniendo en cuenta las pérdidas de calor.
Introducimos datos del aire, combustible, medidas del motor y hacemos los cálculos preliminares:
A la izquierda Unidades del Sistema Internacional, SI y a la derecha Uds. habituales, también se anotan algunas fórmulas de cálculo.
En color rojo los datos de entrada
En otros colores: negro, azul,… variables (fórmulas)




Hasta aquí hemos llegado.
Hemos calculado el máximo rendimiento posible de una máquina térmica que opera entre dos temperaturas T1 y T3:
Rendimiento Reversible = rendimiento del Ciclo de Carnot: η rev = 1 – T1 / T3 = 92 %
Rendimiento termodinámico del Ciclo = η term= Σ Q / Q e = 61 %
No podemos calcular el rendimiento mecánico así que hemos hecho el η efectivo un porcentaje del η termodinámico:
Rendimiento Efectivo = 0,75*ηterm-9E-36*n___nmax^8
ηcgi= |
61% |
Rendimiento del ciclo Gas Ideal |
|||||
η= |
40% |
|
Rendimiento Efectivo |
|
|
|
|
Cálculo del ciclo del motor grado a grado
Para mejorar estos resultados, (ya que Rendimiento Mecánico Aproximado=0,75*ηterm-9E-36*n___nmax^8 se ha calculado por una fórmula inventada para que proporcione valores acordes a la realidad), puesto que no es posible a partir del Trabajo Indicado por los gases en el cilindro ∆Wi=P∆V deducir el Par Motor (porque la Presión P es variable durante el ciclo y el Par Motor también), analizaremos el ciclo con cálculo diferencial utilizando las posibilidades de cálculo del ordenador dividiendo cada vuelta en 360 º, siendo el ciclo de 720º por ser motor de 4 tiempos (2 giros del cigüeñal).
Tomaremos todos los datos del aire, combustible, etc de la hoja de cálculo anterior y añadiremos grados de apertura, adelantos y/o retrasos de las válvulas de admisión y escape, grados que dura la inyección de combustible, material empleado etc.
Mecánica:
En cada instante calcularemos las posiciones del pistón y ángulos de biela y manivela (cigüeñal) y también sus velocidades y aceleraciones, el Volumen ocupado por los gases en el cilindro…
Dinámica:
En cada instante calcularemos las Fuerzas: de inercia del pistón…
Dinámica de fluidos:
En cada instante calcularemos la masa del gas en el interior del cilindro, la que entra en la admisión y la que sale en el escape…
Termodinámica:
En cada instante calcularemos la densidad ρ, la Temperatura T y la Presión P del gas, la Fuerza en el pistón debida a la presión de los gases en el cilindro (trabajo de expansión)…
También calcularemos la Temperatura de las paredes del cilindro Twall, así como el intercambio térmico entre gas, paredes del cilindro y líquido de refrigeración. jasf1961@wordpress.com
Dinámica:
En cada instante sumamos las Fuerzas de inercia del pistón y la Fuerza en el pistón debida a la presión del gas.
Calculamos el Par Motor, Potencia y resto de parámetros.
La secuencia básica de cálculo de variables para Gas Ideal es la siguiente:
φ β γ tt Xp Vp Ap Vtci
∆m m ρ ρ/ρo
∆Qref ∆Qiny ∆Qesc ∆Qtot
∆TgRef ∆TgAdm ∆TgIny ∆TgCom/Exp ∆TgTot Tgas Tgas/To Twall Twall/To
Cp<1000 Cp>1000 Cp Cv C γ n
P P/Po ∆Wexp Wexp
Ftexpan Ftinerc Ftpist Ftbie Ftman Fnman
ParCi Par1Ci Par2Ci Par3Ci Par4Ci Par5Ci Par6Ci Par8Ci Par10Ci Par12Ci ParMotor
Estudiaremos el ciclo del motor grado a grado, para cada ángulo de giro del cigüeñal, α = φ, desde 0 a 720º = 4 π (rd) (2 giros).
En la bibliografía más extendida se utilizan α , φ . Aquí usamos α = en la teoría y en la hoja Excel φ (no es por joder…).
Asimismo en Excel utilizamos γ= π / 2 – α – β que es el ángulo que forma la Fuerza tangencial de la biela con la Fuerza tangencial de la manivela.
También utilizamos γ como coeficiente adiabático en termodinámica.
* En primer lugar hay que hacer un montón de cálculos preliminares (los mismos que hemos realizado anteriormente en
Cálculo del ciclo Otto como Gas Ideal:
– Motor y Cilindros DATOS y CALCULOS
– Biela Manivela DATOS y CALCULOS
– Rendimiento Volumétrico DATOS
– Dosado de combustible de 1 Cilindro DATOS y CALCULOS
– Admisión, Refrigeración y Escapes de 1 Cilindro DATOS y CALCULOS
– Rendimiento Químico Estequiométrico DATOS y CALCULOS
* Calculamos en función del número de revoluciones por minuto del motor n, el tiempo (s/º) que tarda el motor en girar un grado, ti1º:
n (rpm) = n (ciclos/min) = n 2 π / 60 (rd/s) = n 360 / 60 (º/s) = n 60 (º/s) => Δt = ti1º (s/º) = 1 / (n 60)
Así, por ejemplo, para la máxima potencia tendremos:
nmáx = 18000 rpm => Δt = ti1º = 1 / ( 18000 * 60) = 9,26E-06 (s/º) segundos que tarda el motor en girar un grado
Cualquier Variación de una Magnitud ΔM al girar un grado el cigüeñal significa:
ΔM = Mi – Mi-1 donde M será el volumen V, la presión P, la temperatura T, etc.
Mi valor de M en el instante i grado de giro del cigüeñal i Por ejemplo 137 º
Mi-1 valor de M en el instante i-1 grado de giro del cigüeñal i-1 (grado anterior) P. e. 136 º
=> Mi = Mi-1 + ΔM
* Como en los datos podemos adelantar o retrasar la apertura y/o cierre de las válvulas, etc., implica que al programar la hoja de cálculo debemos introducir condiciones IF…THEN…ELSE (Excel emplea la función SI que puede anidarse), para que en un determinado grado la hoja haga un cálculo u otro. Por ejemplo, en el caso analizado posteriormente adelantamos la inyección 11 grados (pero podríamos retrasarla), así que hay un mogollón de celdas con uno o varios condicionales SI para que calcule una fórmula u otra, siendo la parte más compleja la zona donde puede haber cruce de válvulas (retraso del cierre de las válvulas de escape y adelanto de las válvulas de admisión).
* Relaciones cinemáticas entre pistón, biela, manivela:
x = xp, posición que tiene el pistón respecto del Punto Muerto Superior, PMS

jasf1961-Wordpress Motor MCIA MEC Esquema Básico Mecanismo Biela Manivela.JPG
- v = vp, a = ap, velocidad y aceleración del pistón
- w, velocidad angular del cigüeñal Fa, Fi fuerzas de inercia

jasf1961-Wordpress Motor MCIA MEC Relaciones Cinemáticas Mecanismo Biela Manivela
* Fuerzas de Inercia
Fuerzas de inercia = Fpis Iner = Σ Fi = =Σ Fa = Σ ( Fpis Alt 1º + Fpis Alt 2º + Fman Cent ) :
Mto. Alterno: mpb = Masa de (Pistón + Pie de la biela + 2/3 de la caña de la biela)
Mto. Centrifugo: mci = Masa de (Manivela/Cigüeñal + Cabeza de la biela + 1/3 de la caña)
ri = Distancia del centro de gravedad de mci al eje de giro
Rma = Radio de la manivela del cigüeñal
Fpis Alt 1º = -mpb w2 Rma cos α
Fpis Alt 2º = -mpb w2 Rma λ cos 2α
Fman Cent = mci w2 ri cos α
Como mpb y Rma dependen del diseño, resistencia de materiales etc. actuamos sobre el cigüeñal (mci, ri ) añadiéndole contrapesos:
A la Manivela/Cigüeñal (mci) le añadimos contrapesos hasta que los valores de mci e ri nos equilibren el conjunto:
Fpis Alt Tot MAX ≈ – Fman Cent MAX (ver gráficos)
y la fuerza de inercia total, Fpis Iner = Σ Fi alcance los valores mínimos posibles (no se pueden eliminar totalmente).
Realmente con Fman Cent equilibramos la Fpis Alt 1º (ambas dependen del cos α).

jasf1961-Wordpress Motor MCIA MEC Fuerzas de Inercia del Mecanismo Biela Manivela

Inline-4 engine

V-6 engine

The flat 4 or boxer type engine – used in mid-engine cars, makes the vehicle stable by reducing the center of mass, very less vibrations.gif
* Fuerzas y Par Motor
F = Fa + P Ap siendo
F, Fuerza en el pistón Fi = Fa, Fuerza de inercia
P Ap, Fuerza de los gases en el cilindro Ap, Area del Pistón
P, Presión de los gases en el cilindro (INCOGNITA)
Con las relaciones cinemáticas y dinámicas conocemos todas las variables necesarias para calcular el par, la potencia y resto de parámetros mecánicos excepto la Presión P (tampoco conocemos la masa, densidad, Temperatura y resto de variables termodinámicas). Para calcularlas haremos lo siguiente:
En cada etapa del ciclo (Admisión, Compresión, Expansión y Escape), tendremos en cuenta que las válvulas estén abiertas o cerradas.
* V, Volumen que ocupa el gas en el cilindro:
ΔV = Ap Δx siendo ΔV, variación del Volumen Δx, variación de la posición del Pistón
V = Vcc + Ap x siendo Vcc , volumen de la cámara de combustión Ap, Area del Pistón
x, posición que tiene el pistón respecto del Punto Muerto Superior, PMS
xi = f (ai) xi-1 = f (ai-1) Δx = xi – xi-1
Vi = Vi-1 + ΔV = Vi-1 + Ap Δx así para todas las magnitudes. No insistiremos más para no ser cansinos
* Calculamos para cada grado de giro del cigüeñal la variación de masa que entra/sale del cilindro (Volumen de Control):
Δmtotal = Σ Δm = Δmadmsión + Δminyección + Δmescape (en la compresión/expansión no hay Δm salvo fugas)
ρ = m / V siendo ρ, densidad m, masa de gas en el cilindro V, Volumen que ocupa el gas en el cilindro
* Y los intercambios térmicos (energía calorífica) que sufre el gas en el cilindro (Volumen de Control):
ΔQtotal = Σ ΔQ = ΔQrefrigeración + ΔQinyección + ΔQescape
* Y los incrementos de las temperaturas del gas T y de la pared del cilindro Twall
ΔTtotal = Σ ΔT = ΔTrefrigeración + ΔTadmisión + ΔTinyección + ΔTcompresión/expansión
* (El calor que se pierde por el escape afecta al rendimiento del motor, pero apenas hacer disminuir la temperatura del resto del gas que permanece en el interior del cilindro). jasf1961@wordpress.com
Twall = (Tgas + Tref) / 2
La Temperatura media de la pared del cilindro la calculamos como media aritmética de las Temperaturas del gas y del refrigerante, aceite en nuestro caso (F1) o agua (coche normal), en virtud del gradiente de Temperaturas.
* Para hacerlo con más precisión tendríamos que tener en cuenta que los materiales de culata, cilindro y pistón son distintos y que el pistón y la parte del cilindro situada por debajo del pistón, y por tanto variable, están refrigerados por el aceite del cárter.
Estas precisiones afectan poco al cálculo del ciclo, pero hay que tenerlas en cuenta en el diseño del motor para evitar gripados, fugas, etc.
* Y los valores de Cp Aire según fórmulas polinómicas extraídas a partir de las tablas “JANAF”
Cp = f (tablas) => Cv = Cp – R => γ = Cp / Cv =>
C = ΔQ / (m ΔT) => n = Cp – C / (Cv – C) siendo
Cp, calor específico a P cte. Cv, calor específico a V cte. γ , coeficiente adiabático
C, calor específico n, coeficiente politrópico
* n no se utiliza para los cálculos, se pone a título de información.
Para la mezcla de productos de combustión:
Cp(mezcla) = Σ Cpi Ƞi / Σ Ƞi siendo Ƞi, Número de Moles de i
* En cada instante usamos la Ecuación de los Gases – para calcular la presión P a partir de la temperatura T:
Gases Ideales P = ρ R T
Ecuación de Van der Waals P = R T / (( 1/ ρ) – b) – a ρ^2
Ecuación de Redlich / Kwong P = (R T/((1/ρ)-b)) – (a/(T^0,5*(1/ρ)*((1/ρ)+b)))
siendo ρ, densidad R, constante universal de los gases en el SI
ρ = m / V m, masa de gas en el cilindro V, Volumen que ocupa el gas en el cilindro
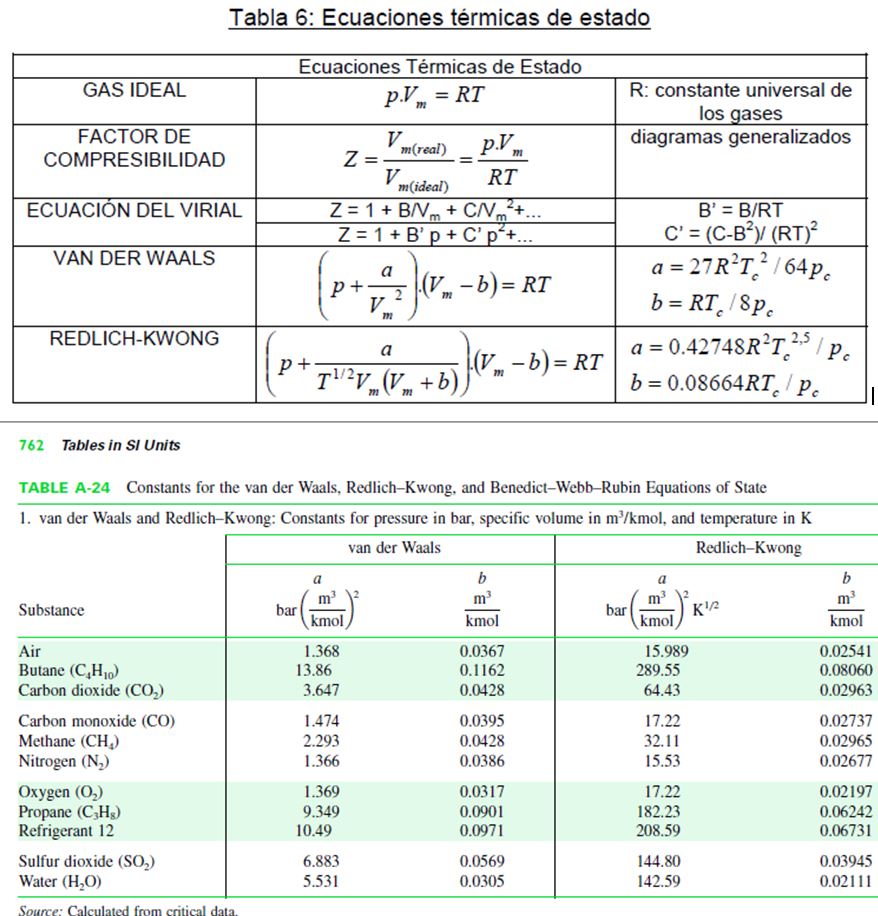
jasf1961-Wordpress Motor MCIA MEC Ecuaciones Térmicas de Estado
* Conocida la Presión calculamos el Trabajo de Expansión (Trabajo Indicado por los gases en el cilindro):
Wind = Σ P dV Como ΔW = P ΔV para 1 grado => Wind = Σ ciclo ΔW = Σ ciclo P ΔV
W ( J ) Ẇ ( w ) Ẇ ( w ) = W ( J ) w (rd/s)
Todos estos cálculos sirven para el primer cilindro.
Para el resto de cilindros no es preciso calcularlos, ya que los resultados son idénticos pero desfasados un ángulo en función del Número de Cilindros:
El ángulo de desfase es 720º/ NuCi en el caso analizado de 8 cilindros 720º / 8 = 90º por tanto
dW = P dV del cilindro 1 en el grado 720º =
dW = P dV del cilindro 2 en el grado 630º =
dW = P dV del cilindro 3 en el grado 540º = etc.
- En la Admisión el cálculo del Rendimiento Volumétrico,
ηvo (relación entre: volumen de aire que realmente entra en el cilindro / volumen del cilindro)
es fundamental para determinar la masa de aire que entra en el cilindro durante la admisión:
Δmadmsión = ρ ηvo ΔV suponemos ηvo constante en todo el intervalo de admisión
ρ no es constante en todo el ciclo, pero en dos grados consecutivos prácticamente lo es y no se comete error.
| Rendimiento Volumétrico DATOS y CALCULOS | |||||||
| TAV= | 0,0001 | s | Tiempo Apertura Válvula (+ – 10 º árbol => f(w)/Neumática => cte) | ||||
| VeSo= | 340 | m/s | Velocidad del Sonido | ||||
| NuVa= | 2 | Nº Válvulas Admisión ( y de Escape) | |||||
| DiVa= | 0,038 | m | Diámetro Válvulas | Dp/4 | 38 | mm | |
| ArVa= | 0,0018 | m^2 | Area Válvulas Admisión y Escape | 18 | cm^2 | ||
| LeVa= | 0,0005 | m | Levantamiento Válvula | ArPi/(2*ArVa)*Cp/Rc_ | 0,5 | mm | |
| ArVL= | 0,0001 | m^2 | Area «lateral» de entrada por Válvulas | 1 | cm^2 | ||
| VeAd= | 101 | m/s | Velocidad del aire en la Válvula | 1.444 | m/s | ||
| MaVa | 0,3 | Nº de Mach en la Válvula | |||||
| DeAd= | 1,126 | Kg/m^3 | Densidad del aire en la Válvula | ||||
| PeAd= | 95.218 | Pa | Presión del aire en la Válvula | ||||
| CoDe= | 2% | Coeficiente Descarga Válvula | |||||
| TeAd= | 295 | ºK | Temperatura del aire en la Válvula | ||||
| ReVa= | 250.612 | Nº de Reynold en la Válvula | |||||
| hg= | 20.038 | w/m^2ºK | Coeficiente de película medio del aire en la Admisión Taylor y Toong | ||||
| hg= | 2.524.095 | w/m^2ºK | Coeficiente de película instantáneo del aire en la Admisión Woschni | ||||
| ηvo= | 96% | Rendimiento Volumetrico | |||||
Tendremos en cuenta que al iniciar el ciclo, parte de los gases de escape no se expulsan al exterior, siendo su fracción másica la Relación de Compresión,
Rc = mar / mafa siendo
mar, Consumo de Aire Residual (Quemado)
mafa, Consumo Aire Fresco Admisión
Rc, Relación de Compresión = Consumo de Aire Residual (Quemado) / Consumo Aire Fresco Admisión
En esta hoja de cálculo, en lugar de hacer esto, activamos la iteración e inicializamos el ciclo con los resultados de la posición φ = 720º:
(masa residual φ = 0º = masa φ = 720º).
En la etapa de Inyección (combustión) tendremos en cuenta el aporte de combustible:
Δminyección = mccº = Cte ya calculada: mccº = 0,000002 kg/ º Consumo Combustible en este ejemplo.
* Por simplificar hemos la hemos calculado como el consumo de combustible del ciclo dividido entre los grados que dura la inyección.
Para mayor exactitud se suele utilizar la Ley de Wiebe.

jasf1961-Wordpress Motor MCIA MEC Ley de Wiebe
donde a = j es el ángulo de combustión jasf1961@wordpress.com
x (j) = mccº = Variable la masa de combustible inyectada en cada grado de giro del cigüeñal.
Como tanto a como m son parámetros experimentales no utilizamos está formulación.
| nºgi | 16 | º/ciclo | Grados de Inyección | ||||
| ti1º= | 9 E-6 | s/º | Tiempo de giro de 1 º del motor | ||||
| mccº | 1 E-6 | kg/ º | Consumo Combustible | 0,001 | g/ º | ||
| ttin= | 148 E-6 | s/ciclo | Tiempo Total Inyección | ||||
| Piny= | 200 E+6 | Pa | Presión Máxima Inyector < 2e8 | 2.041 | kg/cm^2 | ||
| Diny= | 0,002 | m | Diametro Exterior Inyector | 2 | mm | ||
| Liny= | 0,020 | m | Longitud Inyector | 20 | mm | ||
| Aboq= | 25 E-6 | m2 | Area de Salida de la Boquilla del Inyector | 0,25 | mm2 | ||
| nboq= | 2 | Número de Boquillas del Inyector | £ | 2 | |||
| Vsiny= | 4 | m/s | Velocidad de Salida por la Boquilla del Inyector | ||||
| mcin= | 0,076 | kg/s | Consumo Boquilla Inyector | 76 | g/s | ||
| Epi= | 0,0004 | m | Espesor Pared Inyector | 0,430 | mm | ||
| Vtiny= | 126 E-9 | m3 | Volumen Total de los Inyectores | 126 | mm3 | ||
| Viny= | 3,E-08 | m3/ciclo | Volumen Inyectado | 30 | mm3/ciclo | ||
| ArVa= | 0,0018 | m^2 | Area de entrada por Válvulas | 18 | cm^2 | ||
La gasolina se mide por el índice de octanos:
La normal de 95 octanos se compone de:
95% de iso- octano C8H18
5% de n- heptano C7H16
C (%): 95 * 8 + 5 * 7 = 7,95
H (%): 95 * 18 + 5 * 16 = 17,90 => C7,95H17,90 ≈ C8H18 en la práctica
La súper de 98 octanos:
98% de iso- octano C8H18
2% de n- heptano C7H16
C : 98 * 8 + 2 * 7 = 7,98
H: 98 * 18 + 2 * 16 = 17,96 => C7,98H17,96 ≈ C8H18 en la práctica
Cuando comienza la inyección, empieza la reacción química de combustión, que en su forma básica es:
Si Fr = 1 => C8H18(G) + 12,5 O2(G) + 12 * 3,76 N2(G) = 8 CO2(G) + 9 H2O(G) + 12 * 3,76 N2(G)
Siempre que la mezcla sea la estequiométricamente correcta ( Fr = 1 ).
Calor de Combustión de la Gasolina / Gasoil:
Como vemos a continuación el poder calorífico de las gasolinas normal y súper son prácticamente iguales (que no os vendan motos), sin embargo hay diferencias en la detonación (para motores sin inyección la mezcla puede arder prematuramente, lo cual no es bueno) y en su composición química en cuanto a lubricación que prolonga la vida del motor:

jasf1961-Wordpress Motor MCIA MEC Combustible y Relación Estequiométrica del Dosado

jasf1961-Wordpress Motor MCIA MEC Calor de Combustión Formación
Esta ecuación de la reacción química podemos complicarla con óxidos de Nitrógeno ( NO y NO2), cosa que no haremos por sencillez de cálculos, pero para estudiar la contaminación sí hay que tenerlos en cuenta.
Vemos que los productos de la combustión, en orden de presencia son:
N2, H2O, CO2, CO que se miden en %
O2, H2, OH, NO, H, O que se miden en Partículas Por Millón, PPM
H2O, NO2, N2O, HNO, N, HN, CHO que se miden en Partículas Por Billón, PPB
CHN, CH2O, CN, CH, C2H4, C3H6,…. < 1 PPB
Es decir, analizando solamente N2, H2O, CO2, CO (ver cuadro) tenemos ≈ 98 % de precisión de cálculo
(más que de sobra para un proceso teórico = no se le pueden pedir guindas al pavo).
En otras palabras, teóricamente, no se pueden hacer cálculos más precisos. jasf1961@wordpress.com
Gráficos de un ejemplo de combustión teniendo en cuenta más productos de combustión:

jasf1961-Wordpress Motor MCIA MEC Porcentaje Productos Combustión
Sí tendremos en cuenta la aparición de CO cuando el Oxígeno es insuficiente. Estas situaciones se estudian en función del factor de riqueza de combustible Fr.
Si Fr = 1 mezcla estequiométricamente exacta, es decir, la cantidad de combustible/aire es la correcta.
Al empezar la combustión/inyección hay mucho aire y poco combustible Fr<<1, comienza la reacción química
Si Fr < 1 => Fr C8H18(G) + 12,5 O2(G) + 45,12 N2(G) = Fr * 8 CO2(G) + (12,5 – 12,5 Fr) O2(G) + Fr * 9 H2O(G) + 45,12 N2(G)
y queda Oxígeno (12,5 – 12,5 Fr) O2(G) sin reaccionar.
A medida que se inyecta combustible Fr aumenta.
Al terminarse la inyección, Fr alcanza el valor nominal que hayamos fijado:
Si dicho valor es menor que 1 ( Fr < 1 ) la mezcla será siempre pobre durante toda la inyección.
Ejemplo: Hacemos Fr = 0,90 (mezcla pobre en combustible) Grados de Inyección = 16 º
Primer º => Fr1º = 1 * 0,90 / 16 = 0,05625 Segundo º => Fr2º = 2 * 0,90 / 16 = 0,1125 Fr3º = 0,16875 … Fr16º = 0,90
Si fijamos el valor de Fr mayor que 1 ( Fr > 1 ) la mezcla en algún momento deja de ser pobre y pasa a ser rica:
En nuestro ejemplo de la Hoja de Cálculo Fr = 1,25 (mezcla rica en combustible) Grados de Inyección = 16 º
Fr1º = 1 * 1,25 / 16 = 0,078125 … Fr11º = 0,859375
Fr12º = 0,9375 Fr13º = 1,015625 … Fr16º = 1,25
Es decir, en el grado 13º de la inyección la mezcla ya es rica ( Fr > 1 ) y entonces la ecuación es :
Si Fr >1=> Fr C8H18(G) + 12,5 O2(G) + 45,12 N2(G) = 17 * (25 / 17 – Fr) CO2(G) + 17 * (Fr – 1) * CO(G) + Fr * 9 H2O(G) + 45,12 N2(G)
Como hay menos Oxígeno del necesario, aparece 17 * (Fr – 1) * CO(G) en el segundo miembro de la ecuación ya que el CO necesita menos Oxígeno que el CO2.
Los factores que aparecen al lado de cada compuesto se deducen por un sistema de ecuaciones (una ecuación por elemento químico).
Si tuviéramos en cuenta los óxidos de Nitrógeno este sistema de ecuaciones sería mucho más complejo, tanto que salen más incógnitas que ecuaciones (sistema indeterminado) y no se puede resolver de formas explícita, es decir, unas incógnitas hay que ponerlas en función de otras y estudiarlas de forma adimensional (por ejemplo, al aumentar la concentración de NO, aumenta/disminuye la de OH).
Se estudia para disminuir la emisión de las sustancias más contaminantes y nocivas para la salud.
* Dado que la parte de cálculos grado a grado está estructurada por columnas en la hoja de cálculo, es muy fácil insertar otra columna y/o reformular los cálculos.
Se pone la nueva fórmula en la celda del primer grado y se copia hacia abajo (control + J) hasta el grado 720. Si el cálculo en las distintas etapas de admisión, etc. no es necesario se suprime, o si tiene alguna condición se le añade y listo.
Para dejarlo bonito copiamos el formato de otra columna.
De hecho lo voy complicando, perfeccionando poco a poco, día tras día, sin descanso, sin desmayos, ahora lo pongo ahora lo quito, bla bla bla, extraña consistencia, cual sil flotara, envido a la grande, pares no, tres al punto. jasf1961@wordpress.com
Bueno, ¿para qué sirve todo este rollo de las distintas ecuaciones químicas?
Dado que la presión P (nuestra incógnita) de un gas es proporcional al número de moles
P V = n RT utilizaremos P = ρ R T Gases Ideales
(P +a/v²) (v-b)= n RT utilizaremos porque me sale de los oeufs P = R T / (( 1/ ρ) – b) – a ρ^2 Ecuación de Van der Waals
P= R T / (( 1/ ρ) – b) – a ρ²) utilizaremos P = (R T/((1/ρ)-b)) – (a/(T^0,5*(1/ρ)*((1/ρ)+b))) Ecuación de Redlich / Kwong
y que la presión de una mezcla de gases es igual a la suma de las presiones parciales de cada gas existente en la mezcla
y teniendo en cuenta que al producirse la reacción química el número de moles del primer miembro es distinto del número de moles del segundo miembro,
habrá una variación de presión por dicho concepto (el número de moles), aparte de los debidos a la ρ y a la T.
Por dicho motivo calculamos el Rendimiento Molar ηmo = Moles Finales / Moles Iniciales:
Si Fr < 1 ηmo = (57,62+4,5* Fr)/(57,62+ Fr)
Si Fr = 1 ηmo = ( 8 + 9 + 12 * 3,76 ) / ( 1 + 12,5 + 12 * 3,76 ) = 1,06
Si Fr >1 ηmo = (53,12+9*Fr)/(57,62+ Fr)
Que es una función continua, ya que las 3 expresiones dan ηmo = 1,06 para Fr = 1
Por tanto, durante la inyección
P = = ηmo ρRT ó P = ηmo R T / (( 1/ ρ) – b) – a ρ² y la Presión aumentará ≈ 5% debido al ηmo.
También habría que considerar, por el mismo motivo, la tendencia de la reacción a irse hacia la izquierda, disminuyendo la velocidad de reacción, cálculo bastante cabrón y como no me acuerdo ni tengo ganas, no lo hacemos.
Además, por ser una reacción altamente exotérmica (se libera una gran cantidad de energía en forma de calor, la que aporta el combustible) dicha influencia puede despreciarse frente a ésta.
Lo mismo sucede con la temperatura, al aumentar se disminuye la velocidad de reacción.
La literatura existente en cuanto a velocidades de reacción en función de la presión y temperatura viene determinada por constantes de equilibrio Kp y Kt, pero desgraciadamente sus valores están estudiados para condiciones ambientales (≈ 1 atm y 300 ºK), y dado que nuestro proceso se realiza a elevadas presiones y temperaturas (≈ 1.000 atm y 4000 ºK para un F1 en la zona de inyección), no aporta dados cuantitativos (no lo podemos calcular), solo cualitativos (lo que estamos comentando que puede pasar).
También sucede que a elevadas temperaturas el agua se disocia en H2 y O2, ≈ 50% a unos 4000 ºK, esto es positivo ya que tendremos más Oxígeno y se mejorará la combustión.
Peor es con los óxidos de nitrógeno NO, N2O, N2O3, N2O4, N2O5, NO3, N2O6, y encima se pueden disociar…
En fin un jaleo, peor que una pelea de negros en un túnel.
Todos estos óxidos son endotérmicos y por tanto inestables descomponiéndose a temperaturas superiores a 800 ºK. jasf1961@wordpress.com
Por tanto, solo tenemos en cuenta al N2, ya que en la expansión se supera esta T en un motor de F1.
En la etapa de escape desciende, pero el trabajo de expansión ΔWexp indicado por los gases en el cilindro (pistón), es pequeño comparado con la media y poco afecta a los cálculos.
Para un combustible CxHy tendremos:
Si Fr <1 Fr CxHy + (x+y/4) O2 + 45,12 N2 => (Fr x) CO2 + (Fr y / 2) H2O + b O2 + 45,12 N2
Resolviendo b = (x+y/4)(1-Fr) para C8H18 x=8 y=18 => b=12,5(1-Fr)
Si Fr >1 Fr CxHy + (x+y/4) O2 + 45,12 N2 => t CO2 + (Fr y / 2) H2O + s CO + 45,12 N2
Resolviendo t = x(2-Fr)+y/2(1-Fr) s= (x+y/2)(Fr-1)
para C8H18 x=8 y=18 => t=17(25/17-Fr) s=17(Fr-1)
Como t no puede ser negativo => Fr < 25/17 => Fr < 1,47
es decir toda la gasolina que añadamos a mayores de Fr=1,47 no se quemará por falta de oxígeno.
- En la etapa de Escape, el cálculo de la velocidad de escape es primordial. Suponemos que el proceso es Isotérmico, ya que la mayor parte se expulsa muy rápidamente y apenas baja la T dentro del cilindro:
Por Termodinámica, para T = cte => vesc = – (2 R T Ln (P / Po )) ^ 0,5
El flujo másico se define como:
ṁ = Δm / Δt = ρ ΔV / Δt = ρ Area vesc => Para Δt = ti1º =>
Δm = ṁ ti1º = ρ Area vesc ti1º =>
Δm escape = 0,2 ti1º ρ NuVa ArVa vesc = – 0,2 ti1º ρ 2 ArVa (2 R T Ln (P / Po )) ^ 0,5
siendo 0,2 el coeficiente de descarga de la válvula
NuVa = 2 el número de válvulas de escape ArVa, el área de salida del aire por la válvula
- ΔQrefrigeración = -KconTA (2 ArPi + p Dp x ) (Tgas – Tref)*ti1º/ EsCi siendo
KconTA, Coeficiente de Conductividad térmica (del Titanium Alloy) ArPi, Area Pistón
Dp, Diámetro Pistón Tref, Temperatura Agua Refrigeración EsCi, Espesor medio cilindro
* El Coeficiente de Conductividad térmica KconTA es cte.
Otros calculan el Coeficiente de Conductividad térmica KconTA = hc (q) según la formulación de Woschni
Los coeficientes m = 0,8 C1 = 2,28 C2 = 3,24·10-3 de dicha fórmula son experimentales.
Por tanto no utilizo está formulación. jasf1961@wordpress.com
- ΔQinyección = mccº Pcg siendo mccº, masa combustible inyectada en ese grado Pcg, Poder Calorífico Gasolina
- ΔQescape = Δm escape Cv (Tgas – To) siendo Cv, Calor específico a Volumen constante To, Temperatura Ambiente
- ΔTrefrigeración = ΔQrefrigeración / ( m Cp) siendo Cp, Calor específico a Presión constante
- ΔTadmisión = (m Cp T + Δmadmsión Cpo To)/( m Cp +Δmadmsión Cpo) – T
- ΔTinyección = ΔQinyección / (m Cv )
- ΔTcompresión/expansión = T (Vi-1 / Vi )^( γ – 1 ) – T
* Tanto en la inyección como en el escape usamos Cv ( y no Cp), ya que en ambos procesos, por producirse cerca de los Puntos Muertos Superior e Inferior, PMS y PMI, apenas cambia el Volumen (no así la Presión).
En la Compresión el parámetro fundamental del cálculo es el coeficiente adiabático γ de la transformación. También lo es en la Expansión.
Conclusiones:
Apenas hay diferencias al trabajar con Aire / Mezcla productos Combustión, ya que la Temperatura de la mezcla disminuye pero Cpmezcla aumenta y apenas varía el intercambio total de calor:
ΔQp = Δm Cp ΔT ΔQv = Δm Cv ΔT

jasf1961-Wordpress Motor MCIA MEC Temperatura Cp Aire Mezcla Productos Combustion

jasf1961-Wordpress Motor MCIA MEC Temperatura Calor Escape Aire Mezcla Productos Combustion

jasf1961-Wordpress Motor MCIA MEC Presiones Gas Ideal Van der Waals Redlich Kwong

jasf1961-Wordpress Motor MCIA MEC Par Motor Rendimiento Gas Ideal Van der Waals Redlich Kwong

jasf1961-Wordpress Motor MCIA MEC V8
Hoja de cálculo de un Motor de Combustión Interna Alternativo MCIA
Motor de Encendido Controlado MEC
Cálculo del ciclo del motor grado a grado como: (excel)
a) Gas Ideal,
b) Gas de Van der Waals
c) Gas de Redlich / Kwong
d) Aire en todo el ciclo (sin tener en cuenta los productos de combustión)
e) Teniendo en cuenta la mezcla de los productos de combustión y el rendimiento volumétrico de la combustión
Tomaremos todos los datos del aire, combustible, etc de la hoja de cálculo anterior (para no tener que volver a reescribir las mismas fórmulas, que es un rollazo) y añadiremos grados de apertura, adelantos y/o retrasos de las válvulas de admisión y escape, grados que dura la inyección de combustible, material empleado etc.
Engine cycle calculation grade to gradeTo improve these results analyze grade to grade cycle for each crankshaft rotation angle, φ, from 0-720 degrees (2 turns for being 4-stroke engine).At each instant calculate the positions and angles of crank, connecting rod and piston, as the cylinder volume, mass (air + fuel) in the cylinder, the gas temperature, heat at constant pressure Cp, polytropic coefficient k , density ρ and pressure P. Calculate the expansion work DELTA.V P *, the force on the cylinder P * Ap = ftpi, in the connecting rod and the crank, and the torque on the crank will provide engine power.We will take all data from air, fuel, etc. from the previous worksheet and add degrees of openness, progress and / or delays of the intake and exhaust valves, lasting degrees fuel injection, material used etc..
Datos en rojo Fórmulas de cálculos preliminares en otros colores negro, azul, etc.

jasf1961-Wordpress Motor MCIA MEC Datos Formula One 2013

jasf1961-Wordpress Motor MCIA MEC Prestaciones Formula One 2013 Apertura Válvulas

Cilindro
La relación entre el trabajo obtenido y la energía suministrada es el rendimiento η.
η = W (J) / [mc (kg) * Pc (J/kg)] = Ẇ ![]() / / [mc (kg) * Pc (J/kg) / t (s)]
/ / [mc (kg) * Pc (J/kg) / t (s)]
Si W y/o Ẇ lo referimos al interior del cilindro:
dW (J) = P (Pa) * dV (m^3) => dẆ ![]() = P (Pa) * dV (m^3) / t (s)
= P (Pa) * dV (m^3) / t (s)
Obteniendo el trabajo o potencia indicados y hablaremos de η indicado
Si W y/o Ẇ los calculamos por el ciclo Otto hablaremos de η termodinámico ciclo Otto como Gas Ideal
Normalmente se calculan a la salida del motor, es decir en el cigüeñal y hablamos de rendimiento y potencia efectivos.
Si no se han calculado pérdidas por rozamientos, habrá que restárselas.
También hay que restar las pérdidas debidas a bombas, comprensores, etc.
Para calcular la potencia en las ruedas también hay restar las pérdidas debidas a la trasmisión hasta las ruedas …
Aquí empezamos a programar la hoja con la teoría expuesta anteriormente.
Son más de 720 líneas x CK columnas de Excel.Realmente programamos 1 línea (horizontal) de la Admisión, otra de la Compresión, otra para la Expansión y otra para el Escape: unas 4 x CK celdas ≈ 400 celdas.Luego hacemos un Control+J para copiar hacia abajo los 179º restantes de cada etapa de 180º.
Posteriormente como hay avances y retrasos en las aperturas de válvulas (las he limitado a 20º), en dichos intervalos ponemos condicionales SI de Excel para que la hoja sepa si una válvula está abierta o cerrado y proceder en función de ello.
He aquí una imagen de parte de la Admisión de la hoja de Excel, con los cálculos de las principales variables:
Al cambiar cualquier dato o varios, por ejemplo la relación de compresión Rc, cilindrada, …. La hoja se recalcula y se visualizan los resultados, prestaciones, gráficos…
Cálculo de Variables:

Motor MCI MEP MEC Cálculo instantáneo Calculo de Variables

Motor MCI MEP MEC Cálculo instantáneo Calculo de Variables 2
Prestaciones:

jasf1961-Wordpress Motor MCIA MEC Prestaciones Formula One 2013
Motor MCI MEP MEC Cálculo instantáneo Prestaciones

jasf1961-Wordpress Motor MCIA MEC Prestaciones Formula One 2014 vs rpm graficos

jasf1961-Wordpress Motor MCIA MEC Prestaciones Formula One 2014 vs rpm ecuaciones
Motor MCI MEP Cinematica

Motor MCI MEP Cinematica
Motor MCI MEP Comparativa Par Motor vs Nº de cilindros

Motor MCI MEP Comparativa Par Motor vs Nº de cilindros
Motor MCI MEP Densidad Temperatura Presion

Motor MCI MEP Densidad Temperatura Presion
Motor MCI MEP Dinamica

Motor MCI MEP Dinamica
Motor MCI MEP Variables Termodinamicas

Motor MCI MEP Variables Termodinamicas
Motor MCI MEP Diagramas P-V T-V

Motor MCI MEP Diagramas P-V T-V
Ejemplo de la hoja Excel para el motor de Audi 1,9 TDI

jasf1961-Wordpress Motor MCIA MEC TDI 1.9 Volkswage

jasf1961-Wordpress Motor MCIA MEC Ventajas del Turbocompresor

Turbo

jasf1961-Wordpress Motor MCIA MEC Inyector

jasf1961-Wordpress Motor MCIA MEC Esquema Inyector-Bomba movido por Leva

jasf1961-Wordpress Motor MCIA MEC Inyector-Bomba movido por Leva

jasf1961-Wordpress Motor MCIA MEC Components of the Engine

jasf1961-Wordpress Motor MCIA MEC Components of the Engine Pistón Biela

jasf1961-Wordpress Motor MCIA MEC Components of the Engine Block

jasf1961-Wordpress Motor MCIA MEC Components of the Engine Biela Pistón

jasf1961-Wordpress Motor MCIA MEC Cigüeñal

jasf1961-Wordpress Motor MCIA MEC Proporciones Cigüeñal

jasf1961-Wordpress Motor MCIA MEC Turbocompresor Geometría Variable

jasf1961-Wordpress Motor MCIA MEC Cojinete Axial Cigüeñal

Compresor

jasf1961-Wordpress Motor MCIA MEC Bomba de Inyección

jasf1961-Wordpress Motor MCIA MEC Swirl Inyector-Bomba
Piston Deformacion x 1000

Piston Deformacion x 1000
