Cálculo y Diseño de Aerogenerador HAWT

Airfoil XFOIL Alerón Joukovsky f=3% t=20.5%

Power Horizontal Axis Wind Turbine, HAWT JASF Cálculo Aerogenerador vs secion pala

Cálculo Aerogenerador Power Horizontal Axis Wind Turbine HAWT, Angle of Atach α vs secion pala
Diseño de Aerogenerador Horizontal Axis Wind Turbine, HAWT
Al diseñar un aerogenerador hay que tener en cuenta:
1- El Par generado por una Fuerza en un tramo de la pala es proporcional al Radio de la sección al eje de giro.
2- La Velocidad lineal de la Pala, Vp es proporcional al Radio de la sección al eje de giro.
3- El ángulo β entre la Velocidad de la pala, Vp y Velocidad del viento, Vv , que da como resultado la velocidad relativa del viento respecto de la pala, v, también aumenta con el Radio de la sección al eje de giro.
4- El parámetro Tip Speed Ratio, TSR, Relación de velocidad periférica, TSR = Vp / Vv, es otra forma de medir el ángulo β = tg (Vp/Vv)
5- Para disminuir el ángulo β (sin disminuir el Radio), deberemos disminuir la velocidad de giro ⍵ del rotor, obteniéndose las mejores prestaciones en el rango de ⍵ = 0,5 rd/s y ⍵ = 1,5 rd/s siendo un valor inicial de diseño ⍵ = 1,0 rd/s ≈ 10 rpm.
6- Lógicamente como el ángulo β aumenta con el Radio, la sección del perfil alar (Airfoil) va girando paulatinamente.
7- Un valor orientativo del ángulo de ataque, α del Airfoil respecto de la velocidad relativa del viento, v puede ser en torno a α = 10º. Recordemos que en torno a α =14º se produce la separación de la capa límite con la consiguiente pérdida de Sustentación, Stall, disminuyendo la fuerza Lift.
Evidentemente todos estos aspectos dependen del Airfoil considerado, del Reynolds, etc.
La sección de la pala va girando a lo largo del radio y disminuyendo de tamaño por cuestiones de resistencia de materiales.
8- El número de palas viene determinado por el ratio coste de pala/aprovechamiento del viento y está ampliamente generalizado el uso de tres palas. Además de cara a equilibrar las vibraciones es una buena elección.
9- La velocidad nominal del viento de cara al diseño, depende del emplazamiento fundamentalmente.
10- El tamaño de las palas viene determinado por la potencia del aerogenerador y criterios económicos.
11- Para reducir de tamaño el multiplicador se pueden utilizar varios pares de polos en el alternador.

JASF1961 Aerogenerador Datos
En un tramo de la pala los cálculos serán, según la Mecánica:

JASF1961 Aerogenerador Cálculo de la Potencia Total Ẇnzt según la Mecánica 1

JASF1961 Aerogenerador
El diagrama vectorial nos permite visualizar de forma gráfica lo que sucede: cuanto mayor es el radio de la sección al eje del rotor, más inclinado tiene que estar el perfil alar siendo más complicado extraer potencia.
En el análisis mecánico no conocemos el coeficiente de fricción o rozamiento (y por tanto las fuerzas viscosas de rozamiento entre el viento relativo y la pala) con lo cual no podemos cuantificar la contribución de la componente Vcz a la potencia del aerogenerador.
Para hacernos una idea introducimos el espesor de la capa límite ε, que delimita el espacio donde la velocidad del fluido Vc tangente a la superficie de la pala, pasa de su valor local hasta hacerse nula en la superficie de la pala debido a la viscosidad.
Con esta corrección podemos calcular la potencia aproximada:

ASF1961 Aerogenerador Cálculo de la Potencia Total Ẇ según la Mecánica

JASF1961 Aerogenerador Viento Relativo Velocidad Pala Lift and Drag

JASF1961 Aerogenerador Curva Weibull Stall
Como un diseño concreto no satisface óptimamente todas las velocidades del viento se usan las curvas de Weibull para elegir una velocidad de diseño.
Los Airfoils y el ángulo de ataque de cada sección se eligen en función de este rango de velocidades.
Si cada tramo de sección girase respecto de la precedente controlada por software, serían más eficientes (y más costosos).
Para calcular la potencia empleamos la aerodinámica.
En un primer tanteo con los mismos coeficientes CL y CD para todas las secciones.
Para un viento de 12 m/s y una rotación del rotor a ⍵=1,5 rd/s con un perfil de CL=1,20 y CD=0,10 obtenemos una potencia de 6 Mw:

- JASF1961 Aerogenerador Cálculo de la Potencia Total Ẇnzt según la Aerodinámica Vv 12 m s w 1,5 rd s
La Velocidad de la pala máxima Vpmáx no puede exceder de 65 m/s por reglamento.
En este caso Vpmáx = 79,9 m/s no cumpliría la normativa de seguridad (puede desprenderse la pala).
Para una rotación del rotor a ⍵=0,5 rd/s obtenemos una potencia de 1 Mw:

JASF1961 Aerogenerador Cálculo de la Potencia Total Ẇnzt según la Aerodinámica Vv 12 m s w 0,5 rd s
En estos ejemplos no se han modificado los coeficientes de arrastre (Drag), CD ni de sustentación (Lift), CL que dependen (en cada sección son distintos) fundamentalmente de:
el perfil elegido,
el ángulo de ataque α
el Nº de Reynolds Re
De estos parámetros, una vez construido el aerogenerador sólo se puede modificar el ángulo de paso de las palas φ, (pitch angle, el ángulo girado de la pala respecto al rotor), en aquellos aerogeneradores que permitan orientar las palas, los grandes, lo cual no implica que el ángulo de ataque α, (angle of attack) sea el mismo, ni el óptimo en las distintas secciones de la pala.
Un generador con 6 pares de polos, por ejemplo, puede variar la velocidad angular del rotor ⍵=0,42 rd/s (el alternador necesita una frecuencia de ≈ 50 Hertz o ciclos/s que está fijada en Europa).

JASF1961 Aerogenerador Datos Alternador
Número de polos ⍵a (rpm ) del alternador a 50 Hz ⍵a (rpm ) a 60 Hz
1 par = 2 3000 3600
2 pares= 4 1500 1800
3 pares= 6 1000 1200
4 pares= 8 750 900
5 pares= 10 600 720
6 pares= 12 500 600
Con una relación de transmisión de Rct = 125, las velocidades de giro del rotor serán:
Si conectamos 1 par de polos => ⍵ = 24 rpm = ⍵ = 2,51 rd/s.
Si conectamos 2 pares de polos => ⍵ = 12 rpm = ⍵ = 1,26 rd/s.
Si conectamos 3 pares de polos => ⍵ = 8 rpm = ⍵ = 0,84 rd/s.
Si conectamos 4 pares de polos => ⍵ = 6 rpm = ⍵ = 0,63 rd/s.
Si conectamos 5 pares de polos => ⍵ = 4,8 rpm = ⍵ = 0,50 rd/s.
Si conectamos 6 pares de polos => ⍵ = 4 rpm = ⍵ = 0,42 rd/s.
Como la velocidad angular del rotor ⍵ ideal depende de la velocidad del viento, mediante software se pueden conectar/desconectar pares de polos para obtener la máxima potencia posible en cada circunstancia.
En los generadores asíncronos, más usados, el rotor de jaula adapta el número de polos del estator de forma automática.
Así pues, un mismo rotor puede ser utilizado «aproximadamente» con una gran variedad de números de polos.
Al diseñar el aerogenerador hay que partir de la Velocidad del viento Nominal de Diseño, Vv ND, siendo un valor representativo
Vv ND ≈ 10 m/s (valores pequeños hacen el aerogenerador antieconómico por el ratio potencia/coste y valores grandes implica pocos emplazamientos que cumplan la condición de vientos frecuentes de alta velocidad).
El ángulo β a lo largo de la pala depende de Vv y de la ⍵ del rotor.
En los ejemplos anteriores vemos que se obtienen las mayores potencias cuando el ángulo β oscila entre 20º en el inicio de la pala y 80º al final de la misma.
Cuando el ángulo β alcanza valores del orden de 80º, desgraciadamente, en esta parte de la pala (la punta) se generan grandes fuerzas en la dirección del viento, Ʃ Fy, que no generan potencia y obligan a sobredimensionar las secciones, sobre todo las próximas al rotor.
El ángulo de calaje, Ɵ, ángulo que hay que girar el Airfoil a lo largo de la pala (ángulo constructivo de las secciones) es:
Ɵ = α + β – φ para φ = 0 º y α = 10 º Ɵ = 10 º + β
(si queremos α = 10º por ejemplo, constante en toda la pala, entonces Ɵ = α + β oscilará entre 30º en el inicio de la pala y 90º al final de la misma).
Este ángulo Ɵ, es constructivo, una vez fabricada la pala no se puede cambiar el ángulo relativo entre distintas secciones, salvo que la construyéramos en tramos articulados motorizados con software, pudiéndose girar cada tramo de sección respecto de la precedente (solución poco viable y antieconómica).
Variando el ángulo de paso de la pala respecto al rotor, φ , (pitch angle) por ejemplo -5º, entonces α + β oscilará entre 25º en el inicio de la pala y 85º al final de la misma.
En los ejemplos anteriores vemos que para obtener las mayores potencias, además del ángulo β, tenemos que variar, mediante software, la ⍵ del rotor mediante el número de pares de polos conectados del generador (otra posibilidad sería tener una multiplicadora con distintas relaciones de cambios automatizados por software, pero dadas las grandes dimensiones del tren de engranajes no es una solución viable).
Una vez fijados Vv ND = 10 m/s β = 20º – 80º α ≈ 10º (variará a lo largo de la pala) => α + β ≈ 30º – 90º
tenemos que elegir el Airfoil adecuado para cada tramo o sección de la pala, que depende del Reynolds (y debe soportar los esfuerzos mecánicos), con lo cual la sección de la pala irá disminuyendo a lo largo del radio, en cuerda y espesor.
Los mayores momentos y fuerzas se generan en el centro y final de la pala. Estos esfuerzos generan la potencia pero también son responsables de las solicitaciones estructurales en la Sección de Máxima Solicitación, SMS, en la unión de la pala con el rotor.
La flecha máxima en la punta de la pala es y = P*L^3/2*E*IxSMS proporcional al cubo de la distancia (el radio de la pala)
y el ángulo girado por dicha sección es ζ = P*L^2/2*E*IxSMS proporcional al cuadrado de la distancia (el radio de la pala).
Para el diseño de resistencia de materiales calculamos los esfuerzos en los ejes XYZ de cada tramo con distintas Vv:
X, en dirección radial, Ʃ Fx => diseño de la pala a tracción/comprensión
Y, en la dirección del viento, Ʃ Fy => diseño de la pala a flexión
Z, en la dirección normal, Ʃ Fz => diseño de la pala a flexión (esta componente es la que produce el par motor)
Parece lógico que los mayores esfuerzos aparezcan con la Velocidad del viento, Vv máxima (a dicha velocidad se desactiva el aerogenerador por seguridad), pero no necesariamente tiene que ser así.
Con las secciones mínimas necesarias por resistencia de materiales, buscamos airfoils que tengan las condiciones geométricas cuerda/espesor requeridas y el rango de Nº de Reynolds calculado de la sección, eligiendo aquéllos que tengan los mejores valores aerodinámicos (CL ↥, CD ↧, EA ↥).
Este estudio lo hacemos en distintas secciones, siendo las principales aquéllas que generan más potencia (centro y final de la pala) y en la zona de la pala cercana al rotor ponderamos más la resistencia de materiales.
Elegidos los diseños de airfoils en distintas secciones, el conjunto lo hacemos por interpolación mediante un programa de CAD.
Finalmente, a partir del diseño 3D del CAD, mediante simulación, de Finits Elements, FEM, verificamos la resistencia de materiales y con CFD calculamos FL y FD , Fuerzas de sustentación Lift y de arrastre Drag para comprobar la exactitud de los cálculos anteriores.
Por último, una vez afinado el diseño, mediante maqueta y túnel de viento, comprobamos resultados mediante el análisis dimensional.
Ya podemos construir un prototipo de aerogenerador y comprobar los resultados reales.
Resumen:
1-Diseño básico mediante fórmulas matemáticas (es rápido).
2- Comprobación mediante CFD y FE (es lento y tedioso).
3- Comprobación en túnel de viento (lento, tedioso y además costoso).
4- Comprobación con Prototipo (más lento, más tedioso y más costoso).
Para comparar airfoils de forma rápida hay bases de datos con filtros de distintas variables: espesor, L/D, CL máx etc.
Miramos perfiles gruesos para secciones cercanas al rotor y delgados para la punta de la pala. Hay infinitas series:
NACA, D Mark Drela, E Eppler, EH by John Yost, HD Hannes Delago, MH Martin Hepperle, TsAGI, NPL-EC, ECH and EQH, Joukowsky, Van de Vooren, GOE, Helmbold-Keune, Roßner, Parsec, Horten, DHMTU, Guderley,…

FX76MP120 DATOS

Airfoil Alerón Xfoil FX 77-W-153
El diseño de la pala depende de:
- la velocidad del viento Vv (rango variable)
- la velocidad angular del rotor ω que a su vez depende de:
o la relación de transmisión de la multiplicadora Rct
o la velocidad angular del alternador ωa que a su vez depende de
la frecuencia f que depende de
el Número de pares de polos Npp
Como no hay una solución óptima, se tantea con varias opciones. Para una opción dada, escogemos los perfiles de las distintas secciones de la pala:
Escogemos unos cuantos que puedan ir bien y copiamos los datos:

JASF1961 Aerogenerador Comparación de Perfiles Alares
Seleccionamos los mejores:

JASF1961 Aerogenerador Elección de Perfiles Alares
En las distintas bases de datos de airfoils vienen las propiedades en función del Nº de Reynolds, Re,
para Re=25.000 Re=50.000 Re=75.000 Re=100.000
La eficiencia suele aumentar con el Re en esta gama de valores (régimen laminar Re<1.000.000), pero los grandes aerogeneradores suelen tener Re superiores (régimen turbulento), con desprendimientos de la capa límite y creación de vórtices.
Una forma de minimizar estos efectos negativos es disminuir el ángulo de ataque α.
Re = =v*Cr*ρa/μa = v*Cr*/ νa > 1.000.000
| ρa= | 1,170 | kg/m^3 | Densidad del Aire | ||
| μa= | 18 E-6 | kg/ms | Viscosidad dinámica del aire | ||
| νa= | 15 E-6 | m^2/s | Viscosidad cinemática del aire | ||
El Re mide la relación entre las fuerzas de inercia y viscosas, significando que las inerciales son 1.000.000 de veces mayores.
Una vez que hemos hecho una criba de perfiles en función de datos de los Reynolds disponibles ( Re = 1e5) en el caso anterior y L/D de perfiles limpios (sin bichos), hacemos un CFD rápido con programas basados en Profil de Eppler , Xfoil y xflr5 de Drela (An CFD accurate analysis would. require a more sophisticated solver for the Navier-Stokes equations, which would also imply an increase in computer time in the order of 1000), con el Reynolds de nuestro caso Re = 4e6 y perfiles con suciedad:

JASF1961 Aerogenerador Joukovsky f=3% t=20.5% 10º Airfoils Polars

JASF1961 Aerogenerador Joukovsky f=3% t=20.5% 10º Flowfield a

JASF1961 Aerogenerador Joukovsky f=3% t=20.5% 10º

JASF1961 Aerogenerador WORTMANN FX 77-W-153 AIRFOIL

JASF1961 Aerogenerador GOE 570 – 12º
Elegimos, por ejemplo, 3 perfiles de distintos espesores con
un buen ratio L/D (Eficiencia o Rendimiento Aerodinámico) en el rango del Reynolds que tengamos, Re = 4e6
y un rango de ángulo de ataque α amplio, de, por ejemplo, 5º < α < 15º
ya que aunque giremos la pala respecto al rotor φ más el ángulo constructivo Ɵ, relativo de las distintas secciones de la pala sea variable, no conseguiremos un ángulo de ataque α ideal en cada sección a distintas velocidades del viento, ya que
φ + Ɵ = α + β => α = φ + Ɵ – β ( β depende de la Velocidad del viento)
Y copiamos los datos que nos interesen, añadiendo el radio de la sección donde los pondremos y el ángulo Ɵ.
El ángulo de calaje, Ɵ, (ángulo constructivo de la pala), lo calculamos basándonos en los valores previos obtenidos de β.
Para φ = 0 º y α = 10 º => Ɵ = α + β – φ => Ɵ = 10 º + β

JASF1961 Aerogenerador Comparación de Perfiles Alares Reynolds 4e6
La pala la diseñamos interpolando los airfoils elegidos: FX 79-W-660-A GOE 570 Joukovsky f=3% t=20.5%
FX 79-W-660-A en radio 2 m Ɵ=15º
GOE 570 en radio 24 m Ɵ=60º Δβ ≈ 45º
Joukovsky f=3% t=20.5% en radio 60 m Ɵ=78º Δβ ≈ 18º
Nótese que en los primeros 20 metros Δβ ≈ 40º y en los 40 metros restantes Δβ ≈ 20º , ya que β =ATAN(Vp/Vv) es una función trigonométrica (no lineal).
Aquí se ha dibujado interpolando linealmente, por sencillez.
En el diseño final, que será distinto, ya que estamos tanteando, será mejor interpolar trigonométricamente o linealmente con mayor número de secciones de referencia.
En cualquier caso, esto es teoría, son cálculos aproximados: la realidad siempre se impondrá con maquetas y prototipos.

Pala

Pala Az

JASF1961 Aerogenerador Palas con Airfoils

JASF1961 Aerogenerador Palas con Airfoils Detalles
Ahora realizamos de nuevo los cálculos de la potencia, igual que antes, pero teniendo en cuenta:
φ , ángulo girado de la pala respecto al rotor
Ɵ, ángulo constructivo de las secciones
Siendo α el ángulo de ataque α = φ + Ɵ – β que será variable a lo largo de la pala (aunque queremos que sea α ≈ 10º ).
Interpolamos los CL y CD obtenidos de los perfiles de cada tramo en los rangos del Reynolds y α elegidos.
Las diferencias entre el primer tanteo con α CL CD constantes en toda la pala y siendo variables a lo largo de la pala son:

JASF1961 Aerogenerador Cálculo de la Potencia Ẇ CL CD Cte vs Variable
Vemos que el rendimiento baja de Cp ≈ 0,58 (cercano al límite de Betz de 0,59 ) a Cp ≈ 0,47 ya que el ángulo de ataque no tiene un valor óptimo (α ≈ 10º) en toda la pala en el segundo caso (más real).
Observamos que el ángulo β toma valores de ≈ 15º al inicio de la pala y 79º al final para esta configuración (Vv, Rct) con Δβ= 64º.
Los cálculos no son del todo correctos ya que el CL y CD son acordes al perfil de la sección pero no al ángulo de ataque α (en todos los casos los valores de CL y CD son los mismos en cada sección). Para tener más exactitud tendríamos que interpolar dichos datos en función del valor del ángulo de ataque α.
Como CL y CD dependen de las secciones (ya hemos interpolado), pero también del Re y más de α, vamos a interpolar CL y CD en función de α:

JASF1961 Aerogenerador Potencia Ẇ CL CD Variable vs función de α
Como tenemos 3 datos CL = f ( α ) y CD = f ( α ) hacemos ecuaciones de 2º grado.
Ahora CD y CL toman valores en función del airfoil de la sección de la pala y de α .
Comparando resultados:

JASF1961 Aerogenerador Potencia Ẇ CL CD Variable vs función de α comparativa
Los valores de CD y CL cambian considerablemente y por tanto las fuerzas, momentos y la potencia.
Al cambiar la velocidad del viento cambiamos el Nº de polos para que cambie la ⍵ de l rotor (rpm) y optimizar la potencia.
También hay que cambiar el ángulo φ , ángulo girado por software de la pala respecto al rotor para que α esté en un rango próximo a 10º.
Los resultados para el rango de Velocidades del viento Vv = 4 – 25 son, en función del Nº de polos:

JASF1961 Aerogenerador Cálculo de la Potencia Ẇ vs TSR
Estos generadores de arriba tienen mayor Número de pares de polos Npp (mucho más caros y tecnológicamente complicados de fabricar), que los dos casos de abajo, que son menos potentes (BBB, Bueno, Bonito y Barato = NO Existe).

Al cambiar la velocidad del viento Vv, podemos cambiar el Nº de pares de polos Npp, para que cambie la ⍵ del rotor y optimizar la potencia.
También podemos cambiar el ángulo φ , ángulo girado de la pala respecto al rotor para que α esté en un rango próximo a 10º.
φ =ATAN(Vp/Vv)*180/PI() – Δβ + α en este caso Δβ ≈ 64º
Con esto tenemos automatizada la hoja de cálculo.
Ahora ponemos un contador e iteramos para Vv = 1 hasta 25 (es como un ciclo FOR… NEXT o un IF… THEN… ELSE) y así nos calcula la potencia del aerogenerador para cada velocidad de viento.
Ejecutándola con distintas Relaciones de Transmisión de la Caja de Cambios, Rct y ajustando algún parámetro obtenemos valores similares en:
Rendimiento Cp = Energía obtenida/Energía del viento = Ẇaerogenerador/0,5*ρa*Vv^3*PI()*Rma^2 < 0,59 Th. Betz
Cp ≈ 0,38
Relación de velocidad periférica λ = TSR, Tip Speed Ratio
λ = TSR = Velocidad periférica de la punta de la pala / Velocidad del viento = Vp / Vv = ⍵ Rma / Vv
λ = TSR ≈ 4 – 7 óptima
λ = TSR bajará a ≈2 debido a que Vp debe ser menor de 65 m/s por seguridad y reglamento.
Obteniendo, en el rango de Velocidad del viento Vv = (10 – 15) m/s los mejores rendimientos Cp (y potencias Ẇ), cuando la relación de transmisión total del multiplicador (GearBox) es de Rct = 64, a costa de mayores tensiones estructurales, que medimos mediante las siguientes fórmulas para tener una idea orientativa de los esfuerzos (no tiene sentido obtener una gran potencia si al construirlo se rompe debido a enormes fuerzas implicadas):
MyTotal= 7,E+06 Nm Momento Flector y Total No Produce Potencia interesa que MyTotal ↧
MzTotal= 5,E+06 Nm Momento Flector z Total Produce Potencia interesa que MzTotal ↥
ᶆ= 1,34 Ratio Momentos y/z ᶆ=MyTotal/MzTotal interesa que ᶆ ↧
y= 0,22 m Flecha Máxima (punta de pala) y=Fequiv*Rma^3/(2*YM*Ix) interesa que y ↧
ζ = 3,E-03 rd Angulo de Giro de la Seción Ɵ= Fequiv*Rma^2/(2*YM*Ix) interesa que ζ ↧
y= 0,44 m Flecha Máxima (punta de pala) y=Fequiv*Rma^3/(2*YM*Ix) interesa que y ↧
σf= 1,5E+07 Pa Tensión en la Sección σf=Mfmax/Wx interesa que σf ↧
Ϯf= 27 Factor de Seguridad Ϯf=TYS/σf interesa que Ϯf ↥
Fcent= 2,E+06 Fuerza centrífuga Fcent=Fcent interesa que Fcent ↧
mg= 6,E+05 Peso de la pala mg=Peso interesa que mg ↧
σt= 3,7E+06 Pa Tensión debida a la Tracción σt=(Peso+Fcent)/Seccion interesa que σt ↧
Ϯt= 108 Factor de Seguridad a Tracción Ϯt=TYS/σt interesa que Ϯt ↥
σ= 1,8E+07 Pa Tensión total σ=(σf^2+σt^2)^0,5 interesa que σ ↧
Ϯ= 23 Factor de Seguridad Ϯ=TYS/σ interesa que Ϯ ↥
Vpmax= 62 Velocidad de pala máxima

JASF1961 Aerogenerador Potencia Elección Ẇ vs Vv TSR Rct 40
Los resultados globales del aerogenerador y su velocidad de diseño podrían ser:

JASF1961 Aerogenerador Potencia Elección Ẇ vs Vv TSR Rct 105
Analizamos los esfuerzos con matemáticas y luego, si es correcto mediante FEM, Finit Element Model, para cotejar resultados.
Hay que analizar las vibraciones, ya que la velocidad del viento es mayor cuanto más arriba está la pala y menor abajo y menos aún al coincidir con la torre.
Luego hay que diseñar con exactitud las palas, rotor y torre para hacer un CFD más serio y un FEM para comparar resultados.
Con estos parámetros obtenemos 16 Mw con un viento de 25 m/s y 4,5 Mw con un viento de 10 m/s.
Los mejores resultados se han obtenido para:
Relación de velocidad periférica, Tip Speed Ratio TSR ≈ (2 – 7)
Velocidad del rotor ω (rpm) ≈ (4 – 10)
Número de pares de polos Npp ≈ (3 – 18)

JASF1961 Aerogenerador Resistencia Materiales

JASF1961 Aerogenerador Resistencia Materiales 2
Características técnicas del Vestas V112 – 3,0 MW y otros aerogeneradores semejantes:

JASF1961 Aerogenerador Vestas

Aerogeneradores Semejantes
Comparativa Diseño estándar vs Design by JASF (cuerda = 4 m cte.):

Aerogenerador HAWT Design by JASF 2

Aerogenerador HAWT Design by JASF 1

Aerogenerador HAWT JASF Datos
Comparativa para un viento de Vv = 5 m/s. Potencia Teórica ẆT 0,35 Mw vs 0,43 Mw:

Aerogenerador HAWT Estandar vs JASF Vv 5 ms
Comparativa para un viento de Vv = 12 m/s. Potencia Teórica ẆT 5,11 Mw vs 8,63 Mw:

Aerogenerador HAWT Estandar vs JASF Vv 12 ms
Comparativa para un viento de Vv = 15 m/s. Potencia Teórica ẆT 7,38 Mw vs 14,70 Mw:
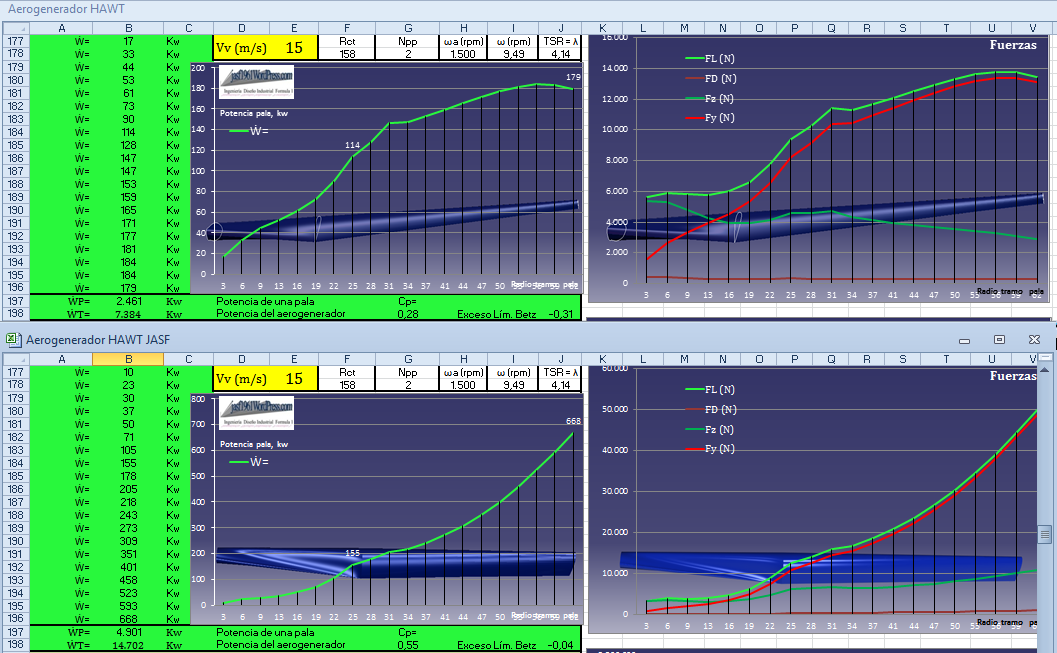
Aerogenerador HAWT Estandar vs JASF Vv 15 ms
En todo el rango de velociddes tenemos:

Aerogenerador HAWT Estandar vs JASF
Incrementamos la Potencia Útil, Ẇu de 5,8 Mw a 11,6 Mw para un viento de Vv = 15 m/s: Ẇu = ẆT * ηr * ηt * ηg
siendo ẆT la Potencia Teórica y ηr, ηt, ηg, los rendimientos del rotor, transmisión y generador respetivamente.
Aerogenerador HAWT design by JASF funcionamiento con un viento de 6 m/s:

Aerogenerador HAWT Design by JASF 4
horas más tarde…

Aerogenerador HAWT Design by JASF 5
¡¡ Humm !! Se ha caído ¿Qué habrá pasado ? Modificamos el diseño…

Aerogenerador HAWT Design by JASF 6 b
time after:

Aerogenerador HAWT Design by JASF 6 c
Aerodinámica del rotor. Diseño
Las principales teorías para el diseño son:
Teoría de la Cantidad de Movimiento (TCM)
Teoría del Momento Cinético (TMC)
Teoría del Elemento de Pala (TEP)
Teoría del Impulso o de la Cantidad de Movimiento (TCM). Ley de Betz.

Teoría del Impulso o de la Cantidad de Movimiento (TCM). Ley de Betz.
La fuerza ejercida por el viento en la unidad de tiempo (Impulso) sobre el área ficticia A barrida por el rotor, es igual a la variación de la cantidad de movimiento del aire que la atraviesa.
Se demuestra que la máxima potencia que se puede extraer del viento es cuando la velocidad de salida es un tercio de la velocidad de entrada: v2= 1/3 v1 siendo:
Ẇ rotor = 16/27 Ẇ aire ≈ 0,59 Ẇ aire
Rendimiento máximo η = Cp = Ẇ rotor / Ẇ aire ≈ 0,59
Se conoce como Ley o Teorema de Betz.
Diferencial de par (momento) para una pala, según TCM:
dM TCM = 4 π ρ Vv^3 a ( 1 – a )^2 r dr / (Np Ω) (1)
Lo malo es que no sabemos el valor de a.
En la teoría de la Cantidad de Movimiento no se han considerado velocidades inducidas, ni la rotación del fluido, defectos que se subsanan en la teoría turbillonaria.
Teoría del Momento Cinético (TMC)
Se considera que el fluido, el aire, cuando llega al rotor ha perdido parte de su velocidad (1-a) y es obligado a girar en sentido contrario al rotor (Ley de acción y reacción).
Esta rotación de estela se traduce en una menor extracción de potencia.
El fluido, al llegar a la pala, se acelera tangencialmente. Este cambio de velocidad se expresa en función del factor de velocidad inducida tangencial a´ y aumenta con el radio de la sección de la pala.

Teoría del Momento Cinético (TMC)
Diferencial de par (momento) para una pala, según TMC:
dM TMC = 4 π ρ Vv a´ ( 1 – a ) Ω r^3 dr / Np (2)
Lo malo es que no sabemos los valores de a ni de a´.
Combinando TCM y TMC:
a´ = a ( 1 – a ) / ( λ x )^2 = a ( 1 – a ) Vv / (Ω r )^2 (3)
siendo
x = r / R λ = Ω R / Vv λr = Ω r / Vv = x λ
Teoría del Elemento de Pala (TEP)
Los modelos anteriores no consideraban los efectos que los perfiles de las palas tiene sobre el fluido.
Diferencial de par (momento) para una pala, según TEP:
dM TEP = 0,5 ρ v^2 Cr (CL cosβ – CD senβ) r dr (4)
CL y CD los conocemos por bases de datos.
Combinando TMC y TEP :
8 π Vv a´ ( 1 – a ) Ω r^2 = Np v^2 Cr (CL cosβ – CD senβ) (5)
Con (3) y (5) se despejan a a´
Lo malo es que salen valores de dM en (1) y (2) parecidos a los obtenidos para TEP.
Es decir los valores de a a´ se adecúan para que dM valga lo mismo calculándolo
por (1) (2) ó (3) pero no aportan nada a lo obtenido con TEP:
| a = | a ´ = | ||||||||
| 0,07 | 0,02 | ||||||||
| Vv*(1-a) = | w ind = 2wa´ | ||||||||
| 24,18 | 0,04 | ||||||||
| Formula Daniel | Constante | Constantes | Formula mia | ||||||
| TCM a=f® | TMC a´=f® | TCM a=cte | TMC a´=cte | ||||||
| a = | a = | Mz (Nm) | a ´ = | w ind = 2 w a´ | Mz (Nm) | Mz (Nm) | Mz (Nm) | w induc | JASF Mz (Nm) |
| 0,032 | 0,039 | 26.951 | 2,13 | 4,24 | 25.898 | 54.121 | 243 | 0,48 | 704 |
| 0,044 | 0,049 | 71.379 | 0,73 | 1,45 | 69.435 | 107.557 | 1.905 | 0,59 | 5.781 |
| 0,044 | 0,048 | 107.336 | 0,33 | 0,65 | 104.436 | 160.993 | 6.390 | 0,36 | 16.136 |
| 0,046 | 0,049 | 148.004 | 0,19 | 0,38 | 144.266 | 214.430 | 15.098 | 0,27 | 33.985 |
| 0,049 | 0,052 | 197.297 | 0,13 | 0,26 | 193.010 | 267.866 | 29.432 | 0,23 | 60.864 |
| 0,055 | 0,058 | 259.166 | 0,10 | 0,20 | 254.956 | 321.302 | 50.793 | 0,21 | 97.953 |
| 0,062 | 0,066 | 337.098 | 0,08 | 0,16 | 334.182 | 374.738 | 80.584 | 0,20 | 146.029 |
| 0,071 | 0,076 | 433.621 | 0,07 | 0,14 | 434.111 | 428.174 | 120.207 | 0,20 | 205.417 |
| 0,071 | 0,075 | 487.919 | 0,06 | 0,11 | 488.488 | 481.610 | 171.062 | 0,16 | 265.305 |
| 0,072 | 0,076 | 547.009 | 0,05 | 0,09 | 548.100 | 535.046 | 234.553 | 0,13 | 333.795 |
| 0,068 | 0,072 | 577.121 | 0,04 | 0,07 | 576.139 | 588.482 | 312.081 | 0,11 | 411.068 |
| 0,068 | 0,072 | 625.637 | 0,03 | 0,06 | 624.241 | 641.918 | 405.048 | 0,09 | 497.259 |
| 0,068 | 0,072 | 678.305 | 0,03 | 0,05 | 676.842 | 695.355 | 514.857 | 0,08 | 592.457 |
| 0,069 | 0,073 | 736.279 | 0,02 | 0,05 | 735.195 | 748.791 | 642.908 | 0,07 | 696.706 |
| 0,070 | 0,074 | 800.595 | 0,02 | 0,04 | 800.451 | 802.227 | 790.604 | 0,07 | 809.998 |
| 0,072 | 0,076 | 872.058 | 0,02 | 0,04 | 873.546 | 855.663 | 959.346 | 0,07 | 932.281 |
| 0,074 | 0,078 | 951.120 | 0,02 | 0,03 | 955.068 | 909.099 | 1.150.538 | 0,06 | 1.063.452 |
| 0,077 | 0,081 | 1.037.759 | 0,02 | 0,03 | 1.045.113 | 962.535 | 1.365.580 | 0,06 | 1.203.359 |
| 0,080 | 0,085 | 1.131.359 | 0,01 | 0,03 | 1.143.136 | 1.015.971 | 1.605.874 | 0,06 | 1.351.801 |
| 0,083 | 0,088 | 1.230.586 | 0,01 | 0,03 | 1.247.783 | 1.069.407 | 1.872.823 | 0,06 | 1.508.528 |
| 0,06 | 0,07 | 11.256.599 | 0,20 | 0,41 | 11.274.397 | 11.235.285 | 10.329.927 | 0,18 | 10.232.877 |
| Media | Media | MzTotal | Media | Media | MzTotal | MzTotal | MzTotal | Media | MzTotal |

JASF1961 Aerogenerador Momentos según TEP TCM TMC
Sin embargo con otras Teorías como TCM con a cte y TMC con a´cte y ésta JASF inventada por mí y que no depende de coeficientes experimentales salen resultados distintos y fáciles de obtener.
Otro tema es que los resultados sean acordes con la realidad o disparates.

JASF1961 Aerogenerador Momentos según TEP TCM TMC JASF
Algunos de los parámetros influyentes más destacados son los coeficientes de sustentación, CL y resistencia aerodinámica, CD funciones del ángulo de ataque α del perfil (y en menor medida del Nº de Reynolds, Re, en nuestro caso donde Re > 1e7).
CL = función ( forma del perfil, α, Re, rugosidad, …) => CL ≈ f (airfoil, α)
CD = función ( forma del perfil, α, Re, rugosidad, …) => CD ≈ f (airfoil, α)
Básicamente, en una sección, depende de la forma de la sección de la pala, perfil o airfoil y del ángulo de ataque α.
Como el ángulo de ataque α, a su vez viene condicionado por el ángulo β entre Velocidad del viento, Vv y Velocidad de la pala, Vp (≈ TSR) y además Vp depende del radio, r de la sección y de la velocidad angular del rotor ⍵, lo tenemos más claro que una pelea de negros en un túnel:
α = f ( Vv, ⍵, r ) => CL y CD ≈ f (airfoil, α) => CL y CD ≈ f (airfoil, Vv, ω, r )
Para calcular la potencia Ẇ y optimizarla:
dẆ = Vp * dFz interesa dẆ ↥ diferencial de potencia de la pala en una sección dr en un radio r
Vp = ω r interesa Vp ↥ ω ↥ r ↥ (Vp está limitado a 65 m/s por seguridad y ruidos)
dFz = dFL*COS(β) – dFD*SENO(β) interesa dFz ↥ => dFL ↥ COS(β) ↥ dFD ↧ SENO(β) ↧
dFy=dFL*SENO(β) + dFD*COS(β) dFy NO produce potencia, sólo tensiones dFD ↧ SENO(β) ↧
dFL ↥ y dFD ↧ => airfoils con una alta relación CL / CD = L / D = FL / FD
COS(β) ↥ y SENO(β) ↧ => β ↧ , ángulos β pequeños
Pero si β ↧ , ángulos β pequeños => TSR min= Vp min / Vv max ≈ 0,1 => Vp ↧
Como Vp no puede ser pequeña y grande a la vez, tenemos un problema.
La solución es:
Vp está limitado a 65 m/s => Rmax 65 m y ω ≈ 1 rd/s ≈ 10 rpm => Vp max = ω r = 1 rd/s * 65 m = 65 m/s
r = (Rmin – Rmax) ≈ (2 – 65 ) m
ω ≈ 1 rd/s ≈ 10 rpm (Buenos rendimientos)
Vp = ω r ≈ (2 – 65 ) m/s
Vv ≈ (3 – 25 ) m/s
TSR = λ = Vp / Vv β = Arc tg ( Vp / Vv)
TSR min= = λ min = Vp min / Vv max ≈ 0,1 β ≈ 6 º
TSR óptimo = λ opt = ≈ 6 – 8 β ≈ 80 – 83 º
TSR max = λ max = Vp max / Vv min ≈ 20 β ≈ 87 º
De la función α = f ( Vv, ⍵, r ) => CL y CD ≈ f (airfoil, α) => CL y CD ≈ f (airfoil, Vv, ω, r )
ya tenemos definidos ω, r, airfoils con FL / FD ↥ altos para Re 1e7 – 6e7 y
Vv es la velocidad del viento: buscaremos emplazamientos como Buenos Aires.
El ángulo de ataque α tiene buenos ratios CL / CD = FL / FD en torno a 5 º para perfiles gorditos y 10 º para los esbeltos.
A unos 14 º se produce el stall o pérdida brusca de sustentación Lift, L, FL, por lo que
no hay que apurar los ángulos de ataque, ya que en un aerogenerador una pérdida brusca puede provocar daños mecánicos.
En un avión es mortal.
La esbeltez se mide mediante el ratio espesor/cuerda, t/c ( thickness / chord).
dẆ = Vp * dFz
dẆ = ω * r * ( dFL*COS(β) – dFD*SENO(β) ) despreciando dFD por ser pequeño frente a dFL
dẆ ≈ ω * r * dFL*COS(β)
dẆ ≈ ω * r * CL * 0,5 * ρa * Cr * dr * v^2 * COS(β)
dẆ ≈ 0,5 * ρa * CL * Cr * v^2 * COS(β) ω * r * dr como v = Vv / COS(β
dẆ ≈ 0,5 * ρa * CL * Cr * ( Vv^2 / COS(β) ) ω * r * dr
Las aeroturbinas rápidas presentan una serie de ventajas:
· Se obtienen elevados valores de Cp junto con un amplio margen de velocidades para los que son posibles valores aceptables.
· Proporcionan rotores más ligeros, debido fundamentalmente a aumentar la velocidad relativa a la pala y con ello los efectos aerodinámicos, siendo por lo tanto posible construirlo de menor anchura (cuerda).
· La rapidez del rotor ocasiona que para igual potencia sea menor el par (Ẇ = Par * ω ), reduciéndose las cargas sobre la parte lenta del eje, con lo que puede construirse más ligero.
Un régimen de giro alto del rotor requiere una multiplicación menor en la caja de engranajes, reduciéndose su costo y aumentando su eficiencia.
La obtención de elevados coeficientes de potencia para λ = TRS elevados requiere de un diseño aerodinámico depurado.
· Afortunadamente, el reducido Cp a bajas velocidades, que ocasiona pares bajos en el arranque, es compatible con el bajo par de arranque de los generadores eléctricos.
El empleo de secciones de las palas con forma de perfil de ala ha demostrado proporcionar elevados coeficientes de potencia.

Curva Cp Vs TRS vs Nº de Palas

Curva Cp Vs TRS vs Posicion de Palas

Curva Cq Vs TRS vs Posicion de Palas
Los perfiles usados siguen la tecnología aeronáutica de perfiles de alas y de hélices de baja velocidad, si bien recientemente se han desarrollado perfiles específicos para turbinas de viento.
La forma adecuada a velocidades subsónicas sigue unas líneas generales consistentes en:
· Un borde enfrentado a la corriente, denominado borde de ataque o borde de entrada, redondeado y de forma lisa y suave.
Esta forma permite al perfil actuar con elevado rendimiento a distintos ángulos de orientación a la corriente.
· Un borde en el extremo de sotavento, denominado borde de fuga o borde de salida, afilado.
Esta forma tiene por objeto evitar que la corriente le rodee, salvo con un desprendimiento intenso.
Dirige la corriente y permite reducir la resistencia al avance.
· La cuerda del perfil de longitud c, que es la línea recta que une el borde de ataque con el borde de fuga.
· Una línea de curvatura, equidistante entre ambos lados del perfil.
El extradós es el más convexo y el intradós el menos, pudiendo llegar a ser cóncavo.
La distancia máxima a la cuerda define la curvatura máxima del perfil cmax, la cual suele estar ente el 25% al 50% de la cuerda, comenzando en el borde de ataque.
La curvatura máxima usada va de cero (perfil simétrico) a un 15% de la cuerda.
La línea de curvatura es normalmente una curva suave, habiéndose empleado arcos de círculo, parábolas y otras curvas más complejas.
· Una distribución de espesor, definido por la distancia entre extradós e intradós.
Normalmente es una curva suave que alcanza su máximo tmax entre el 20% y el 40% de la cuerda (t de “thickness” en inglés).
Cuanto más grueso (mayor espesor) es un perfil, mayor resistencia aerodinámica tiene; pero permite una estructura más rígida para soportar las cargas.
Los perfiles con curvatura tienen un óptimo de espesor por consideraciones aerodinámicas y de resistencia mecánica.
Esquema de la geometría de perfiles aerodinámicos subsónicos.

Esquema de la geometría de perfiles aerodinámicos subsónicos
Coordenadas del extradós: ye = yc + yt
Coordenadas del intradós: yi = yc – yt
Coordenadas de la línea de curvatura yc
Coordenadas de la distribución de espesor yt
Del orden de 2/3 de la sustentación se genera por el extradós (succión) y el resto por el intradós (sobrepresión).
El extradós es una superficie más importante que el intradós, el no comprender esto ha retrasado el desarrollo de perfiles aerodinámicos eficientes hasta nuestro siglo.
Si el ángulo de ataque del perfil α es excesivo, digamos que superior a unos 15º a 20º, la corriente del extradós no puede seguir los fuertes cambios de dirección que esto supone y se desprende de la superficie del perfil, dejando de ejercer succión, siendo ocupado su lugar por fluido que proviene de las inmediaciones, el cual también se desprende.
Este movimiento adquiere carácter turbulento tridimensional, altera la distribución de presiones y estropea el funcionamiento del perfil. Como consecuencia se pierde sustentación y aumenta la resistencia.
Se dice entonces que el perfil está en pérdida (“stall” en inglés).

Stall
La resistencia del perfil se debe a dos causas, una es la distribución de presiones que da una componente según la corriente y la otra son los esfuerzos de cortadura en la capa límite originados por el elevado gradiente de velocidades en ella, que hacen que las velocidades de la corriente se anulen al llegar a la pared.
De todo lo anterior puede deducirse que las presiones actuando sobre la superficie han de ser proporcionales a la presión dinámica de la corriente sin perturbar ρv2/2 y en consecuencia la sustentación L, resistencia D y par de encabritamiento M.
Estas han de ser proporcionales asimismo al área de la pala S, que para una forma en planta rectangular es igual al producto de la
cuerda c por la envergadura l, S = c l.
Los efectos viscosos intervienen, por lo que la influencia del número de Reynolds, Re, será apreciable.
Será asimismo apreciable el efecto del número de Mach M cuando su valor sea del orden de la unidad.
En consecuencia, podemos definir unos coeficientes adimensionales de sustentación, resistencia y de momento con una dependencia funcional tal y como la siguiente:

CL CD CM
Se define la eficiencia aerodinámica como el cociente CL/CD y mide la capacidad de proporcionar sustentación frente a la resistencia asociada. Se llegan a obtener valores superiores a 150 en casos ideales, siendo más prácticos valores inferiores a 100.
Para ayudar a evaluar las actuaciones de los perfiles se suele representar este parámetro o su inverso como función de CL, determinando la recta tangente desde el origen su valor máximo posible.
Energía Eólica de Eolo de Pedro Fernández Díez http://libros.redsauce.net/
La Tierra funciona como una gran máquina térmica que transforma parte del calor solar en la energía cinética del viento.
La energía eólica tiene como ventajas la de ser inagotable, gratuita y no lesiva al medio ambiente, pero cuenta también con los grandes inconvenientes de ser dispersa y aleatoria.
Bajo la acción de la presión, el aire de la atmósfera se desplaza de un lugar a otro a diferentes velocidades, dando lugar al viento.
El gradiente de velocidades es mayor cuanto mayor es la diferencia de presiones y su movimiento viene influenciado por el giro de la Tierra.
Las causas principales del origen del viento son:
a) La radiación solar que es más importante en el Ecuador que en los Polos
b) La rotación de la Tierra que provoca desviaciones hacia la derecha en el Hemisferio Norte y hacia la izquierda en el Hemisferio Sur
c) Las perturbaciones atmosféricas.
El movimiento de la Tierra se rige por la siguiente relación entre aceleraciones:
aabsoluta= arelativa + aarrastre + aCoriolis
Ley exponencial de Hellmann.- La velocidad del viento varía con la altura, siguiendo aproximadamente una ecuación de tipo estadístico, conocida como ley exponencial de Hellmann, de la forma: vh= v10 ( h/10 )α
en la que vh es la velocidad del viento a la altura h,
v10 es la velocidad del viento a 10 metros de altura y
α es el exponente de Hellmann que varía con la rugosidad del terreno, y cuyos valores vienen indicados en la Tabla I.1.
En la Fig I.11, se indican las variaciones de la velocidad del viento con la altura según la ley exponencial de Hellmann.
Tabla I.1.- Valores del exponente de Hellmann en función de la rugosidad del terreno
Lugares llanos con hielo o hierba α = 0,08 ÷ 0,12
Lugares llanos (mar, costa) α = 0,13 ÷ 0,16
Terrenos poco accidentados α = 0,2 ÷ 0,26
Zonas rústicas α = 0,25 ÷ 0,4
Terrenos accidentados o bosques α = 0,2
Terrenos muy accidentados y ciudades α = 0,14
Elementos básicos de un aerogenerador
1. Rotor:
El rotor es el elemento que permite el movimiento de rotación del aerogenerador. Está formado principalmente por las palas y un buje que transmite el movimiento de rotación a un eje que conecta con la caja de cambios. Dependiendo del aerogenerador, podrá disponer de un sistema de palas de paso variable o de paso fijo. En el caso de las de paso variable permitirá modificar su orientación en función del viento para conseguir de esta forma siempre el máximo rendimiento.
2. Caja de cambios:
Para adaptar la velocidad de rotación del eje del rotor con la velocidad de rotación del generador se utiliza un sistema de engranajes. Este sistema es utilizado en general para turbinas de alta potencia. Aún así, puede haber turbinas que no dispongan de este sistema.
3. Generador:
El generador es el encargado de transformar la energía mecánica en energía eléctrica. Transforma la energía de rotación que transmiten las palas de la turbina generando así una corriente alterna trifásica.
4. Góndola:
La góndola consiste en la carcasa situada en la parte superior del aerogenerador cuya función es proteger los elementos básicos del aerogenerador como son el generador, la caja de cambios y otros elementos importantes.
5. Sistema de orientación:
Debido a que el viento no tiene siempre una misma dirección, el aerogenerador dispone de un sistema de orientación que coloca el rotor perpendicular a la dirección del viento para aprovechar su máxima energía. En función del aerogenerador, el sistema de orientación estará diseñado para que el aerogenerador esté de cara al viento o de espalda al viento, aunque la primera opción es la más utilizada.
6. Sistema de seguridad:
El sistema de seguridad es el encargado de disminuir la velocidad del rotor o pararlo en caso de demasiado viento o alguna anomalía en el funcionamiento del aerogenerador.
7. Torre:
La torre es el elemento encargado de sostener la turbina. Esta debe ser capaz de soportar las fuerzas provocadas por el viento, así como vibraciones y otros fenómenos como pueden ser rayos, corrosión por agua de mar, formación de hielo, etc.

Esquema Góndola-Rotor 1

Esquema Góndola-Rotor 2

Reductora Epicicloidal 2 Etapas Plano 1

Reductora Epicicloidal 2 Etapas Materiales 1

Reductora Epicicloidal 2 Etapas Plano 2

Reductora Epicicloidal 2 Etapas Materiales 2
VELOCIDAD VARIABLE Y VELOCIDAD FIJA .- Dentro de las máquinas de paso variable, las diferentes opciones de regulación de velocidad se pueden comparar, desde los diseños menos sofisticados a los más complejos.
Aerogenerador de velocidad fija.- La estructura del aerogenerador de velocidad fija consiste en una caja multiplicadora y un generador asíncrono directamente acoplado a la red por su estator, con unas baterías de condensadores para compensar la energía reactiva. Muchos de los aerogeneradores de gran potencia que operan hoy en día en parques eólicos son de este tipo. Incorporan un generador asíncrono de rotor de jaula bobinada estándar, gracias al cual se consigue un precio ajustado.
Los inconvenientes de funcionar a velocidad fija son las sobrecargas mecánicas que se generan debido a las ráfagas de viento. Estas fluctuaciones de potencia en el viento se traducen, aunque filtradas, en fluctuaciones de la potencia eléctrica generada.
El deslizamiento del generador varía con la energía generada cuando varía la velocidad, y es función de la resistencia del devanado del rotor, es decir, a mayor resistencia mayor deslizamiento, por lo que una forma de variar el deslizamiento consiste en variar la resistencia del rotor del alternador.
El generador asíncrono demanda energía reactiva de la red, lo cual es otro inconveniente desde el punto de vista de la red eléctrica; el consumo de energía reactiva del generador de rotor de jaula se compensa y corrige con baterías de condensadores.
La inestabilidad del viento supone, por lo tanto, un problema para la maquinaria del aerogenerador y para la red eléctrica de distribución.
El control de orientación de las palas es relativamente sencillo, el aumento de precio es pequeño y el generador sigue siendo un generador estándar de jaula de ardilla, al que se le añade un módulo de resistencias variables en la parte posterior.
El deslizamiento se puede empezar a aumentar cuando se esté cerca de la potencia nominal de la aeroturbina, funcionando el generador en estas circunstancias, aproximadamente, a la mitad de su deslizamiento máximo. Con una ráfaga de viento, las señales del mecanismo de control hacen que el deslizamiento aumente para permitir que el rotor gire un poco más rápidamente, hasta que el mecanismo regulador del cambio del ángulo de paso de las palas pueda hacer frente a la situación; a partir de este momento, el deslizamiento disminuye.
Velocidad variable con generador de inducción doblemente alimentado.- Este sistema está formado por un sistema multiplicador y un generador asíncrono cuyo estator está conectado directamente a la red y cuyo rotor lo está a través de dos convertidores de frecuencia.
Con esta estructura se consigue regular la velocidad del sistema en un rango del orden de la velocidad nominal. Los convertidores no deben soportar toda la potencia de la máquina, sino sólo una fracción de ella, resultando de ésto un equipo electrónico más sencillo. Al poder variar la velocidad, nos acercamos más a puntos de rendimiento aerodinámico más altos.
El generador asíncrono es estándar, de jaula de ardilla de rotor bobinado. A velocidades altas del viento se genera energía por el rotor; la potencia de salida no tiene fluctuaciones. La potencia reactiva se puede controlar, como en el caso de un generador síncrono. Las ráfagas no implican sobrecargas en el multiplicador, sino que es una energía que se emplea en aumentar la velocidad.
El inconveniente es el aumento de precio debido a la utilización de un sistema de control más sofisticado y de los equipos electrónicos de conversión de potencia en el rotor.
Velocidad variable con generador síncrono multipolo.– Este sistema es el más complejo de todos. El sistema multiplicador se elimina merced a un generador síncrono multipolo, empleándose para variar la velocidad en el estator dos convertidores que controlan toda la potencia de la máquina.
Las ventajas de este sistema son:
– La mejora del rendimiento aerodinámico
– La potencia de salida sin fluctuaciones
– El control de la energía reactiva
– La eliminación del sistema multiplicador
Sin embargo, este sistema puede tener grandes inconvenientes ya que la eliminación del multiplicador implica la construcción de un generador muy complicado, que ya no es estándar y, por lo tanto, caro. Además como los equipos electrónicos de conversión de potencia manejan toda la potencia, encarecen el aerogenerador. A pesar de ésto, es el futuro de los grandes aerogeneradores.
GENERADORES SÍNCRONOS
Principios de un generador trifásico (o motor).- Todos los generadores trifásicos utilizan un campo magnético giratorio. En la Fig VI.a1 se han instalado tres electroimanes alrededor de un círculo.
Cada uno de los tres imanes está conectado a su propia fase en la red eléctrica trifásica. Como se puede ver, cada electroimán produce alternativamente un polo norte y un polo sur hacia el centro. Las letras están en negro cuando el magnetismo es fuerte, y en gris claro cuando es débil. La fluctuación en el magnetismo corresponde exactamente a la fluctuación en la tensión de cada fase. Cuando una de las fases alcanza su máximo, la corriente en las otras dos circula en sentido opuesto y a la mitad de tensión. Dado que la duración de la
corriente en cada imán es un tercio de la de un ciclo aislado, el campo magnético da una vuelta completa por ciclo.
Operación de un motor síncrono.- El rotor es la aguja de la brújula (con el polo norte de rojo) que sigue exactamente el campo magnético, y completa una revolución por ciclo. En una red de 50 Hz, la aguja completa 50 revoluciones por segundo, lo que equivale a 50 x 60 = 3000 r.p.m.
La razón por la que se le llama motor síncrono es que el imán del centro gira a una velocidad constante síncrona, (girando exactamente como el ciclo), con la rotación del campo magnético.
Se le llama bipolar porque tiene un polo norte y un polo sur. Puede parecer tripolar, pero de hecho la aguja de la brújula experimenta la tracción de la suma de los campos magnéticos que están alrededor de su propio campo magnético, por lo que si el imán de la parte superior es un polo sur fuerte, los dos imanes de la parte inferior equivalen a un polo norte fuerte.
Se le llama motor de imán permanente debido a que la aguja de la brújula del centro es un imán permanente, y no un electroimán (se podría fabricar un motor real sustituyendo la aguja de la brújula por un potente imán permanente, o un electroimán que mantenga su magnetismo gracias a una bobina, arrollada alrededor de un núcleo de hierro, alimentada con corriente continua).
El montaje de los tres electroimanes es el estator del motor.
Si se empieza a forzar el imán para que gire (en lugar de dejar que la corriente de la red lo mueva), trabaja como generador, devolviendo corriente alterna a la red. Cuanto más par se le aplique, más electricidad producirá, aunque el generador seguirá girando a la misma velocidad, impuesta por la frecuencia de la red eléctrica.
Aeroturbinas con generadores síncronos.- Los devanados del estator, desde un punto de vista constructivo, son iguales que los de una máquina asíncrona. El inductor, en el generador síncrono, es el rotor que alberga los polos generadores del campo magnético que induce la circulación de corriente en los devanados del estator.
El rotor puede ser devanado o de imanes permanentes.
Si el rotor es devanado, la corriente de excitación se suministra mediante anillos rozantes y escobillas o mediante una excitatriz. La ventaja es la posibilidad de regular potencia reactiva y la desventaja es la necesidad de adecuar la velocidad de giro del eje de alta velocidad a la velocidad de sincronismo.
El proceso de sincronización para la conexión de estos generadores requiere el ajuste de la velocidad de giro del rotor y del ángulo de par (ángulo que forma la tensión de la red en el punto de conexión con la fuerza electromotriz inducida en el estator), ambos valores deberán ser cercanos y conseguirlo es difícil debido a que el par de la turbina cambia constantemente con las ráfagas de viento.
Una vez conectado el aerogenerador a la red, la velocidad de rotación de la máquina puede ser constante o variable si la conexión a red se realiza mediante un convertidor variando las frecuencias de las corrientes sobre el inducido.
Para aerogeneradores a velocidad constante, sólo existirá un punto de funcionamiento para el cual la máquina está operando con el máximo rendimiento.
Si el rotor es de electroimanes alimentados por continua de la red eléctrica, dado que la red suministra corriente alterna, hay que convertir la corriente alterna en corriente continua antes de enviarla a las bobinas de los electroimanes del rotor, conectados a la corriente mediante escobillas y anillos rozantes en el eje del generador.
Sistema de acoplamiento directo aeroturbina-generador síncrono.– La velocidad de giro de un generador estándar es del orden de 1500 rpm mientras que una velocidad típica de la aeroturbina está entre 5 y 60 rpm, por lo que se precisa de una caja de engranajes entre el generador y el rotor.
Utilizando un generador de baja velocidad, la turbina se puede acoplar directamente al mismo; la ventaja de este tipo de acoplamiento directo está en un costo más bajo que en los sistemas con caja de engranajes, menor longitud de la barquilla, mejora de la eficiencia,…
Como la velocidad del generador es del orden de 100 veces mayor para que la caja de engranajes sea innecesaria, se requiere que el número de polos sea suficientemente grande para generar una señal de frecuencia apropiada a la salida; respecto a un generador normal, el generador de acoplamiento directo es más grande.
Cambio de la velocidad de rotación del generador.- La velocidad de un generador que está directamente conectado a una red trifásica es constante y está impuesta por la frecuencia de la red.
Sin embargo, si se dobla el número de imanes que hay en el estator, se puede asegurar que el campo magnético girará a la mitad de la velocidad; el campo magnético se mueve en el sentido de las agujas del reloj durante media revolución antes de alcanzar de nuevo el mismo polo magnético; simplemente se han conectado los seis imanes a las tres fases en el sentido de las agujas del reloj.
Número de polos rpm a 50 Hz rpm a 60 Hz
1 par = 2 3000 3600
2 pares= 4 1500 1800
3 pares= 6 1000 1200
4 pares= 8 750 900
5 pares= 10 600 720
6 pares= 12 500 600
Un generador de 2 pares de polos = 4 polos, 1500 rpm a 50 Hz = 25 rev/s, tiene en todo momento cuatro polos (dos pares), dos polos sur y dos polos norte.
Dado que un generador sólo completa media revolución por ciclo, obviamente dará 25 revoluciones por segundo en una red de 50 Hz, o 1500 r.p.m. Al doblar el número de polos en el estator de un generador síncrono, hay que doblar el número de imanes en el rotor.
Otros números de polos.- Se introduce otro par de polos añadiendo 3 electroimanes más en el estator; con 9 imanes se consigue una máquina de 6 polos (3 pares de polos), girando a 1000 r.p.m. en una red de 50 Hz.
El término velocidad del generador síncrono se refiere a la velocidad del generador cuando está girando de forma síncrona a la frecuencia de red, que se aplica a todo tipo de generadores; sin embargo, en el caso de generadores asíncronos (o de inducción) equivale a la velocidad en vacío del generador.
La mayoría de las aeroturbinas usan generadores de 4 ó 6 polos; la razón por la que se utilizan estos generadores de velocidad relativamente alta (1500 rpm – 1000 rpm), es por ahorrar en tamaño y costo.
El par máximo que un generador puede manejar depende del volumen del rotor.
Para una potencia de salida dada, se puede elegir entre un gran generador de 12 polos (caro) de baja velocidad (500 rpm), o un generador más pequeño de 4 polos (barato) de alta velocidad (1500 rpm).
b) GENERADORES ASÍNCRONOS (O DE INDUCCIÓN)
Los generadores asíncronos o de inducción que se utilizan en la industria eólica pueden ser de rotor bobinado y de jaula.
La función principal del devanado trifásico del estator es magnetizar la máquina y suministrar la corriente generada.
Por los devanados del rotor (o barras de cobre o de aluminio en el caso del rotor de jaula, conectadas eléctricamente por anillos de aluminio finales), sólo circula la corriente inducida; cuando la excitación externa está presente, el campo magnético del estator gira a la velocidad síncrona, impuesta por la pulsación de las corrientes de excitación provenientes de la red, que atraviesan el devanado del estator.
El campo magnético del rotor se mueve a la misma velocidad que el del estator, (la de sincronismo), independientemente de que el rotor esté bloqueado o girando a cualquier velocidad.
Si el rotor del generador gira a la velocidad de sincronismo, los devanados del estator no perciben variación del flujo magnético y, en consecuencia, tampoco habrá corrientes inducidas en el estator; el rotor desliza respecto al campo magnético del estator que gira a la velocidad de sincronismo, por lo que funcionando como generador, el rotor girará a una velocidad un poco superior a la de sincronismo.
A medida que aumenta la diferencia de velocidad de giro entre el rotor y el campo producido por el estator, se induce una tensión mayor en el rotor y, en consecuencia, crece la corriente que circula por él; a mayor corriente, el campo magnético debido al rotor crece, y el flujo de potencia activa hacia la red es mayor, como también lo es el consumo de potencia reactiva por la magnetización de la máquina (el factor de potencia del generador de inducción varía con la carga).
Esta tendencia se mantiene hasta llegar al par resistente máximo del generador. Dentro de un rango limitado la potencia y el par son proporcionales al deslizamiento; la potencia reactiva consumida en este tramo es capaz de mantener el flujo magnético necesario para que el generador presente un par resistente creciente, pero a partir de un determinado deslizamiento (entre 5÷ 10% según la máquina) el incremento de la corriente en el rotor hace que por las pérdidas por efecto Joule, disminuya el par resistente y, por lo tanto, se pueda producir el embalamiento de la máquina.
Son pocos los casos en los que una excesiva velocidad del viento haga que el par de la turbina pueda exceder al par máximo del generador; no obstante, el control estará programado para desconectarse de la red si la potencia máxima se supera durante cierto tiempo.
También se deberá desconectar con velocidades de viento bajas, si la velocidad de la turbina lleva a funcionar al generador a velocidades por debajo de la de sincronismo, invirtiendo el par generador y poniéndose a funcionar como motor.
La ventaja principal del funcionamiento asíncrono es su flexibilidad ante fluctuaciones en la velocidad del viento.
El inconveniente principal es la necesidad de una corriente de excitación para la magnetización, que se traduce en un consumo de potencia reactiva de la red.
El generador de inducción en operación normal y directamente conectado a la red es robusto y estable.
El deslizamiento se incrementa cuando aumenta la carga.
El mayor problema es que durante el consumo de la corriente que magnetizará los devanados del estator, el factor de potencia es relativamente bajo, por lo que se deben conectar bancos de condensadores en paralelo con el generador.
Operando de este modo, el generador de inducción no es controlable y cualquier fluctuación se transmite a la red modificada sólo por la impedancia interna del generador. Los convertidores electrónicos de potencia mejoran esta situación, controlando la corriente del rotor (para generadores asíncronos de rotor bobinado) con la finalidad de controlar la potencia reactiva y el deslizamiento, para variar el punto operativo.
El rotor de jaula de ardilla.- La mayoría de las turbinas eólicas del mundo utilizan un generador asíncrono trifásico (de jaula bobinada), también llamado generador de inducción, para generar corriente alterna.
Fuera de la industria eólica y de las pequeñas unidades hidroeléctricas, este tipo de generador no está muy extendido.
Lo curioso es que inicialmente fué diseñado como motor eléctrico; de hecho, una tercera parte del consumo mundial de electricidad se utiliza para hacer funcionar motores de inducción que mueven maquinaría en fábricas, bombas, ventiladores, compresores, etc, y otras aplicaciones donde se necesita convertir energía eléctrica en energía mecánica.
Una de las razones para la elección de este tipo de generador es que es muy fiable, y comparativamente no resulta caro, y tiene propiedades mecánicas que lo hace especialmente útil en turbinas eólicas (el deslizamiento del generador, y una cierta capacidad de sobrecarga).
El rotor, provisto de un núcleo de hierro, utiliza un apilamiento de finas láminas de acero aisladas, con agujeros para las barras conductoras de aluminio.
El rotor se sitúa en el centro del estator tetrapolar, conectado directamente a las tres fases de la red eléctrica.
Funcionamiento como motor.- Cuando se conecta a la corriente, la máquina empieza a funcionar como motor, girando a una velocidad ligeramente inferior a la velocidad síncrona del campo magnético del estator.
Si se observan las barras del rotor desde arriba se tiene un campo magnético moviéndose respecto al rotor, que induce una corriente muy elevada en las barras del rotor, que apenas ofrecen resistencia, pues están cortocircuitadas por los anillos finales.
El rotor desarrolla entonces sus propios polos magnéticos, que se ven, por turnos, arrastrados por el campo magnético giratorio del estator.
Funcionamiento como generador.- Si se hace girar el rotor de forma manual a la velocidad síncrona del generador, p.ej. 1500 r.p.m. para el generador síncrono tetrapolar, no sucede nada, dado que el campo magnético gira exactamente a la misma velocidad que el rotor, por lo que no se produce ningún fenómeno de inducción en el rotor, y no interaccionará con el estator.
Si se aumenta la velocidad por encima de las 1500 r.p.m., el rotor se mueve más rápidamente que el campo magnético giratorio del estator, lo que significa que el estator inducirá una gran corriente en el rotor.
Cuanto más rápidamente gire el rotor, mayor será la potencia transferida al estator en forma de fuerza electromagnética, y posteriormente convertida en electricidad suministrada a la red eléctrica.
Deslizamiento del generador.- La velocidad de un generador asíncrono varía con el par torsor que se le aplique.
En la práctica, la diferencia entre la velocidad de rotación a potencia máxima y en vacío es muy pequeña, alrededor de un 1%.
Esta diferencia en porcentaje de la velocidad síncrona es el llamado deslizamiento del generador.
Un generador tetrapolar gira en vacío a 1500 r.p.m. si se conecta a una red con una corriente de 50 Hz.
Si el generador está funcionando a la máxima potencia, girará a 1515 r.p.m.
El hecho de que el generador aumente o disminuya ligeramente su velocidad cuando el par torsor varía, es una propiedad mecánica muy útil; ésto significa que habrá menos roturas y desgastes en la caja multiplicadora (menor par torsor máximo).
Esta es una de las razones más importantes para la utilización de generadores asíncronos, en lugar de generadores síncronos, en aerogeneradores directamente conectados a la red eléctrica.
Ajuste automático de los polos del rotor.- Hasta ahora no se han especificado el número de polos del estator cuando se describe el rotor. Lo positivo del rotor de jaula de ardilla es que él mismo adapta el número de polos del estator de forma automática, por lo que un mismo rotor se puede utilizar con una gran variedad de números de polos.
Requerimientos de conexión a la red.- El generador síncrono de imán permanente puede funcionar como generador sin conexión a la red.
El generador asíncrono es diferente, pues precisa que el estator esté magnetizado por la red antes de funcionar, aunque se puede hacer funcionar un generador asíncrono de forma autónoma si se le provee de condensadores que le suministren la corriente magnetizante necesaria.
También es preciso que haya algo de magnetismo remanente en el hierro del rotor cuando se ponga en marcha la turbina (en caso contrario, necesitará una batería y electrónica de potencia, o un pequeño generador Diesel, para arrancar el sistema).
Cambio del número de polos del generador.- Los generadores (y motores) están fabricados con un gran número de imanes estatóricos, minimizando el entrehierro entre el rotor y el estator.
Al mismo tiempo es necesario refrigerar los imanes. El hierro del estator consta de un gran número de delgadas láminas de acero aisladas de 0,5 mm de espesor, que se apilan para formar el hierro del estator.
Esta disposición en capas se realiza para evitar que las corrientes parásitas en el hierro del estator disminuyan la eficiencia del generador. El problema de proveer de más polos a un generador asíncrono de jaula bobinada se reduce a conectar de distinta forma los imanes vecinos; se puede coger un grupo de imanes al tiempo, conectándolos a la misma fase conforme nos vamos moviendo alrededor del estator, o bien se cambia a la siguiente fase cada vez que se tenga un nuevo imán.
Generador de número de polos variable, dos velocidades.- Algunos fabricantes equipan sus turbinas con dos generadores, uno pequeño para periodos de vientos suaves, y otro grande para periodos de vientos fuertes.
Un diseño común en las máquinas modernas es un generador de número de polos variable que (dependiendo de cómo están conectados los imanes del estator) puede funcionar con diferente número de polos y, por tanto, a distinta velocidad de rotación.
Algunos generadores se fabrican por encargo como dos en uno, es decir, que son capaces de funcionar a dos velocidades diferentes (por ejemplo, un generador de 400 kW y otro de 2000 kW).
Este diseño se está extendiendo cada vez más en toda la industria.
Si vale o no la pena utilizar un generador doble o un número mayor de polos para los vientos suaves dependerá de la distribución de velocidades del viento local, y los costes de los polos adicionales comparado con el precio que el propietario de la turbina obtiene por la electricidad.
Una buena razón para utilizar un sistema de generador doble es que puede hacer funcionar su turbina a más baja velocidad de rotación a bajas velocidades de viento, lo que supone una mayor eficiencia aerodinámica, y un menor ruido de las palas del rotor (que sólo suele suponer un problema a bajas velocidades del viento).
Generadores de deslizamiento variable.- Durante muchos años, los fabricantes de motores eléctricos se han enfrentado al problema de que sus motores sólo podían girar a velocidades casi fijas, determinadas por el número de polos del motor.
El deslizamiento del generador en una máquina asíncrona (por cuestiones de eficiencia) suele ser muy pequeño, por lo que la velocidad de giro varía alrededor de un 1% entre el régimen en vacío y a plena carga.
Sin embargo, el deslizamiento es función de la resistencia de los devanados del rotor del generador; como a mayor resistencia, mayor deslizamiento, una de las formas de variar el deslizamiento es variar la resistencia del rotor, aumentando el deslizamiento del rotor hasta un 10% para hacer frente a las ráfagas violentas de vientos.
En motores, ésto se suele hacer mediante un rotor bobinado con cables de cobre arrollados, conectados en estrella, y conectados a resistencias variables externas, además de un sistema de control electrónico para operar las resistencias.
La conexión se suele hacer con escobillas y anillos rozantes, lo que supone un claro inconveniente respecto al diseño técnico, elegante y simple, de una máquina de rotor de jaula bobinada.
También introducen partes que se desgastan en el generador, por lo que se requiere un mantenimiento adicional.
Bibliografía:
Eolo de Pedro Fernández Díez http://libros.redsauce.net/
LA ENERGÍA EÓLICA: Principios básicos y tecnología.
Antonio Lecuona Neumann Leganés, 2002
DISEÑO PRELIMINAR DE UN AEROGENERADOR DE 4,5 MW DE POTENCIA
PFC_Daniel_Rodrigo_Gonzalez Diseño de Aerogenerador Tutor: Álvaro Cuerva Tejero 30 de junio de 2011
Búsqueda y optimización Airfoils de perfiles alares:Enlaces de interés:
http://www.airfoildb.com/foils/search
http://www.motiva.fi/myllarin_tuulivoima/windpower%20web/es/tour/wres/guidep.htm
http://www.motiva.fi/myllarin_tuulivoima/windpower%20web/es/tour/wres/pow/index.htm
http://www.motiva.fi/myllarin_tuulivoima/windpower%20web/es/tour/econ/econ.htm
Diseño y fabricación:
http://www.gamesacorp.com/es/productos-servicios/aerogeneradores/diseno-y-fabricacion/
Computational fluid dynamics, CFD
Aerogenerador HAWT Design by JASF 6 c
Geometry : rotor tripala radio 62 m cuerda cte. 4 m Mesh Geometry: 650000 m3
Nodos necesarios ≈ Re ^9/4 ≈ 6E+15 Nodos mallado ≈ 1 E+6 Nodes ≈ 6 E+6 Elements
Perfomance: CPU: 8 cores Parallel Residual ≈ 1 E-4 Converged ≈ 25 – 30 it ≈ 20 minutes / per velocity

Aerogenerador HAWT JASF CFD Mesh

Aerogenerador HAWT JASF CFD Input Pressure

Aerogenerador HAWT JASF CFD Input Total Pressure Gradient

Aerogenerador HAWT JASF CFD Output Velocity u

Aerogenerador HAWT JASF CFD Output Velocity

Aerogenerador HAWT JASF CFD Pathline 2

Aerogenerador HAWT JASF CFD Pathline 3

Aerogenerador HAWT JASF CFD Pressure and Pathlines

Aerogenerador HAWT JASF CFD Rendering

Aerogenerador HAWT JASF CFD Shear Dtrain Rate Vortex

Aerogenerador HAWT JASF CFD Streamline 3

Aerogenerador HAWT JASF CFD Streamline 4

Aerogenerador HAWT JASF CFD Streamline 5

Aerogenerador HAWT JASF CFD Streamline 6

Aerogenerador HAWT JASF CFD Velocity Vector Vv 10 m s.PNG

Aerogenerador HAWT JASF CFD Volumen Rendering

Aerogenerador HAWT JASF CFD VORTEX CORE REGION
Comparativa Momentos según:
* Teoría del Elemento de Pala, TEP (Blade Element Method, BEM, Blade Element Momentum Theory)
* Computer Fluid Dynamics, CFD
| Nota: por simplificar, φ = 36 º , ángulo girado de pala respecto al rotor, se ha mantenido constante en el CAD | ||||||||
| Solver: Steady State Stationary (Estado Estable Estacionario). Turbulence: k-w SST | ||||||||
| ω | ṁ | Npp | λ = TSR | Vv | MFzTotalTEP | MFzTotalCFD | MFzTotalCFD | MTEP/MCFD |
| rd/s | kg/s | Uds | Ratio | m/s | Nm | Secuencial | Inicializando | Ratio |
| 0,279 | 96.495 | 9 | 3,49 | 5 | 1.312.794 | 611.500 | 597.120 | 2,15 |
| 0,503 | 192.989 | 5 | 3,14 | 10 | 5.025.817 | 2.578.400 | 2.690.300 | 1,95 |
| 0,838 | 289.484 | 3 | 3,49 | 15 | 11.815.145 | 5.299.900 | 5.393.400 | 2,23 |
| 0,838 | 385.979 | 3 | 2,61 | 20 | 18.618.446 | 13.104.000 | 12.370.000 | 1,42 |
| 0,838 | 482.473 | 3 | 2,09 | 25 | 26.444.481 | 22.678.000 | 21.280.000 | 1,17 |
Comparando los resultados obtenidos con TEP y CFD v emos que los Momentos se aproximan (TEP = CFD) cuando λ = TSR ≈ 2
| FTEP | FCFD | FTEP/FCFD | TEP | Cp | CFD | Cp | Cp | TCE jasf | Cp |
| N | N | Ratio | Ẇ |
Ẇ |
Secuencial | Inicializando | Ẇ |
||
| 79.252 | 42.515 | 1,86 | 366.270 | 0,40 | 170.609 | 0,18 | 0,18 | 398.805 | 0,43 |
| 271.590 | 171.230 | 1,59 | 2.527.986 | 0,34 | 1.296.935 | 0,18 | 0,18 | 2.956.344 | 0,40 |
| 713.264 | 384.160 | 1,86 | 9.901.092 | 0,40 | 4.441.316 | 0,18 | 0,18 | 12.345.007 | 0,49 |
| 833.425 | 661.190 | 1,26 | 15.602.258 | 0,26 | 10.981.152 | 0,19 | 0,18 | 16.814.827 | 0,28 |
| 944.273 | 940.960 | 1,00 | 22.160.475 | 0,19 | 19.004.164 | 0,16 | 0,15 | 21.246.778 | 0,18 |
Como Cp es el doble según TEP, otra forma de verlo es:
la Eficiencia Aerodinámica EA = CL / CD , es decir, los valores de CL CD obtenidos con Xfoil o similar son demasiado optimistas.
Cambiando CL a la mitad para Joukovsky:
| Elección por mayor Eficiencia = L/D de Perfiles Alares computados con bugs and dirt (insectos y suciedad) | ||||||||||||
| Croquis | Nº Reynolds | α | CL | CD | L/D | Radio Sección | Ángulo Ɵº | |||||
| GOE 570 |
|
4,E+06 | 5 | 1,066 | 0,143 | 7 | 3,5 | 0 | ||||
| 10 | 1,835 | 0,151 | 12 | |||||||||
| 15 | 2,476 | 0,173 | 14 | |||||||||
| GOE 570 | 4,E+06 | 5 | 1,888 | 0,043 | 44 | 33,5 | 28 | |||||
| 10 | 2,433 | 0,064 | 38 | |||||||||
| 15 | 2,916 | 0,096 | 30 | |||||||||
| AH 94-W-301 | 4,E+06 | 5 | 0,653 | 0,028 | 23 | |||||||
| 10 | 1,038 | 0,051 | 20 | |||||||||
| 15 | 1,436 | 0,074 | 19 | |||||||||
| Joukovsky | 4,E+06 | 5 | 0,5 | 0,029 | 17 | 60,5 | 46 | |||||
| f=3% t=20.5% | 10 | 0,8 | 0,032 | 25 | ||||||||
| 15 | 1 | |||||||||||
obtenemos para Vv = 10 m/s Ẇ TEP = 1,5 Mw siendo Ẇ CFD= 1,3 Mw
| Vv (m/s) | ẆT (Mw) | ẆTEP (Mw) | ẆTCE (Mw) | ẆmLB | Ẇ aire | Cp | TSR | Npp | ωa (rpm) | ω (rpm) | Ϯ |
| 2 | 0,0 | 0,0 | 0,1 | 0,0 | 0,1 | 0,74 | 7,84 | 10 | 300 | 2,40 | 122 |
| 3 | 0,1 | 0,1 | 0,2 | 0,1 | 0,2 | 0,48 | 5,23 | 10 | 300 | 2,40 | 122 |
| 4 | 0,2 | 0,1 | 0,2 | 0,3 | 0,5 | 0,34 | 3,92 | 10 | 300 | 2,40 | 122 |
| 5 | 0,3 | 0,2 | 0,4 | 0,5 | 0,9 | 0,29 | 3,49 | 9 | 333 | 2,67 | 162 |
| 6 | 0,4 | 0,3 | 0,6 | 0,9 | 1,6 | 0,27 | 3,27 | 8 | 375 | 3,00 | 140 |
| 7 | 0,7 | 0,5 | 0,9 | 1,5 | 2,5 | 0,26 | 3,20 | 7 | 429 | 3,43 | 117 |
| 8 | 1,0 | 0,8 | 1,3 | 2,2 | 3,8 | 0,27 | 3,27 | 6 | 500 | 4,00 | 94 |
| 9 | 1,6 | 1,2 | 2,1 | 3,2 | 5,4 | 0,29 | 3,49 | 5 | 600 | 4,80 | 72 |
| 10 | 1,9 | 1,5 | 2,4 | 4,4 | 7,4 | 0,25 | 3,14 | 5 | 600 | 4,80 | 68 |
| 11 | 2,9 | 2,3 | 4,1 | 5,8 | 9,8 | 0,30 | 3,56 | 4 | 750 | 6,00 | 49 |
| 12 | 3,4 | 2,7 | 4,5 | 7,6 | 12,8 | 0,27 | 3,27 | 4 | 750 | 6,00 | 47 |
| 13 | 3,9 | 3,1 | 4,9 | 9,6 | 16,3 | 0,24 | 3,02 | 4 | 750 | 6,00 | 45 |
| 14 | 4,4 | 3,5 | 5,3 | 12,0 | 20,3 | 0,22 | 2,80 | 4 | 750 | 6,00 | 43 |
| 15 | 7,3 | 5,7 | 9,9 | 14,8 | 25,0 | 0,29 | 3,49 | 3 | 1.000 | 8,00 | 28 |
| 16 | 8,1 | 6,4 | 10,6 | 18,0 | 30,3 | 0,27 | 3,27 | 3 | 1.000 | 8,00 | 27 |
| 17 | 9,0 | 7,1 | 11,3 | 21,5 | 36,3 | 0,25 | 3,08 | 3 | 1.000 | 8,00 | 26 |
| 18 | 9,9 | 7,8 | 12,0 | 25,6 | 43,1 | 0,23 | 2,90 | 3 | 1.000 | 8,00 | 25 |
| 19 | 10,8 | 8,5 | 12,7 | 30,1 | 50,7 | 0,21 | 2,75 | 3 | 1.000 | 8,00 | 24 |
| 20 | 11,8 | 9,3 | 13,4 | 35,1 | 59,2 | 0,20 | 2,61 | 3 | 1.000 | 8,00 | 24 |
| 21 | 12,8 | 10,1 | 14,1 | 40,6 | 68,5 | 0,19 | 2,49 | 3 | 1.000 | 8,00 | 23 |
| 22 | 13,8 | 10,9 | 14,8 | 46,7 | 78,8 | 0,18 | 2,38 | 3 | 1.000 | 8,00 | 22 |
| 23 | 14,9 | 11,7 | 15,5 | 53,3 | 90,0 | 0,17 | 2,27 | 3 | 1.000 | 8,00 | 21 |
| 24 | 15,9 | 12,5 | 16,2 | 60,6 | 102,3 | 0,16 | 2,18 | 3 | 1.000 | 8,00 | 21 |
| 25 | 17,0 | 13,4 | 16,9 | 68,5 | 115,6 | 0,15 | 2,09 | 3 | 1.000 | 8,00 | 20 |
| 26 | 18,2 | 14,3 | 17,6 | 77,0 | 130,0 | 0,14 | 2,01 | 3 | 1.000 | 8,00 | 19 |
| Vpmax= | 52 | Rct= | 125 | 0,27 | 3,29 | ᶆ= | 1,36 | Ϯ= | 19 |
Teoría del Momento Cinético TMC
Teoría de la Cantidad de Movimiento TCM
Teoría del Elemento de Pala TEP (Blade Element Method, BEM, Blade Element Momentum Theory)
Tip Speed Ratio λ=TSR Relación de velocidad periférica
Las teorías de turbomaquinaria predicen rendimientos máximos η para λ = TSR ≈ 10
En estos casos existen ductos (rodetes), paredes físicas que evitan que el flujo se disperse aumentando el rendimiento η
Las teorías TCM TMC TEP predicen:
para la potencia Ẇ rendimientos máximos Cp para λ = TSR ≈ 8
para el momento o par M rendimientos máximos para λ = TSR ≈ 6
según la Eficiencia Aerodinámica ( f en la figura ), que puede ser EA = Lift / Drag = f = 33 para λ = TSR ≈ 5
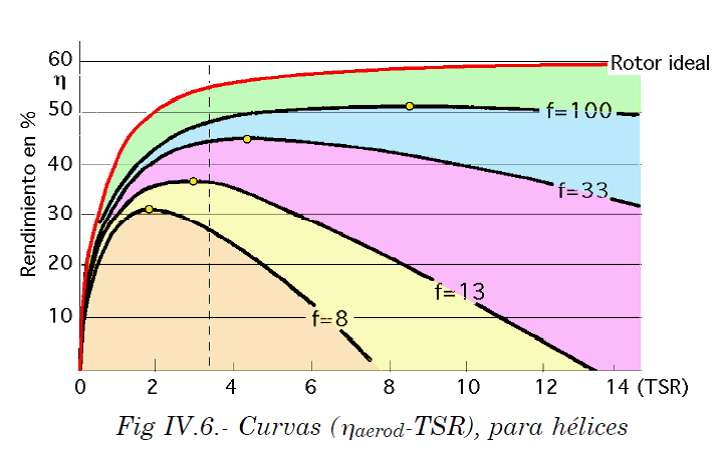
Curvas Cp – λ = TSR
1) Centrándonos en CL y CD de perfiles sucios y radios de las 3 palas de ≈ 60 m y cuerda cte ≈ 4 m desing by JASF
2) Centrándonos en una Velocidad del viento Vv = 10 m/s como velocidad de diseño y futuros cálculos.
Comparando TEP con CFD para Vv = 10 m/s ( Gearbox Rct = 125 ) y distintas ω (distintos λ = TSR ):
| ω | ṁ | Npp | λ = TSR | Vv | MFzTotalTEP | MFzTotalCFD | MFzTotalCFD | MTEP/MCFD |
| rd/s | kg/s | Uds | Ratio | m/s | Nm | Secuencial | Inicializando | Ratio |
| 1,013 | 192.989 | 5 | 6,32 | 10 | 6.346.292 | 950.000 | 907.590 | 6,68 |
| 0,628 | 192.989 | 4 | 3,92 | 10 | 5.294.113 | 1.839.800 | 1.967.400 | 2,88 |
| 0,503 | 192.989 | 5 | 3,14 | 10 | 5.025.817 | 2.578.400 | 2.690.300 | 1,95 |
| 0,419 | 192.989 | 6 | 2,61 | 10 | 4.472.000 | 2.996.000 | 3.060.400 | 1,49 |
| 0,359 | 192.989 | 7 | 2,24 | 10 | 4.188.716 | 3.292.900 | 3.292.900 | 1,27 |
| 0,251 | 192.989 | 10 | 1,56 | 10 | 3.581.054 | 3.561.600 | 3.561.600 | 1,01 |
Según el CFD el par máximo lo obtenemos para λ = TSR ≈ 1,56 de los 6 casos analizados
Comparando los resultados obtenidos con TEP y CFD vemos que
MFzTotalTEP ≈ MFzTotalCFD a medida que λ = TSR ≈ 1,50
y la potencia Ẇ máxima para λ = TSR ≈ 3,14
| FTEP | FCFD | FTEP/FCFD | TEP | Cp | CFD | Cp | Cp |
| N | N | Ratio | Ẇ |
TEP | Ẇ |
Secuencial | Inicializando |
| 780.000 | 4.851 | 160,79 | 6.428.794 | 0,87 | 962.350 | 0,13 | 0,12 |
| 372.000 | 156.300 | 2,38 | 3.324.703 | 0,45 | 1.155.394 | 0,16 | 0,17 |
| 271.590 | 171.230 | 1,59 | 2.527.986 | 0,34 | 1.296.935 | 0,18 | 0,18 |
| 205.000 | 162.130 | 1,26 | 1.873.768 | 0,25 | 1.255.324 | 0,17 | 0,17 |
| 164.000 | 154.160 | 1,06 | 1.503.749 | 0,20 | 1.182.151 | 0,16 | 0,16 |
| 98.480 | 126.600 | 0,78 | 898.845 | 0,12 | 893.962 | 0,12 | 0,12 |
Nota: Vv es la velocidad del viento a la altura del rotor ( h = 120 m ) aguas arriba, y varía con la altura h sobre el terreno y la rugosidad del mismo:
Para una rugosidad del terreno de Rug = 0,0300 Área agrícola abierta sin cercados ni setos y con edificios muy dispersos. Sólo colinas suavemente redondeadas
| Vv= | 10 | m/s | Velocidad del Viento en rotor | h= | 120 | m | |||
| Rug= | 0,0300 | m | Rugosidad del terreno 0,0002 – 1,6 | ||||||
| h= | 58 | m | Altura sobre el terreno | Vv= | 9 | m/s | |||
| h= | 182 | m | Altura sobre el terreno | Vv= | 11 | m/s | |||
la Velocidad del viento Vv, varía según la altura (posición) de la pala, aunque haremos los cálculos con Vv = 10 m/s constante para no complicar el tema.
1) Centrándonos en potencia Ẇ máxima para λ = TSR ≈ 3,14
Obtenemos un Cp ≈ 0,34 según TEP
Según la Teoría de la Cantidad de Movimiento TCM Cp = 4a(1-a)^2
| a | Cp= |
| 0,05 | 0,18 |
| 0,06 | 0,21 |
| 0,07 | 0,24 |
| 0,08 | 0,27 |
| 0,09 | 0,30 |
| 0,10 | 0,32 |
| 0,11 | 0,35 |
| 0,12 | 0,37 |
| 0,13 | 0,39 |
| 0,14 | 0,41 |
| 0,15 | 0,43 |
| 0,16 | 0,45 |
| 0,17 | 0,47 |
| 0,18 | 0,48 |
| 0,19 | 0,50 |
| 0,20 | 0,51 |
| 0,21 | 0,52 |
con Cp ≈ 0,34 a ≈ 0,10 y (para TCM=TMC) a´ ≈ 0,02 constantes en todo el radio de la pala
dan buenas aproximaciones a TEP.

JASF1961 Aerogenerador Potencia vs Velocidad TEP TCM TMC ctes
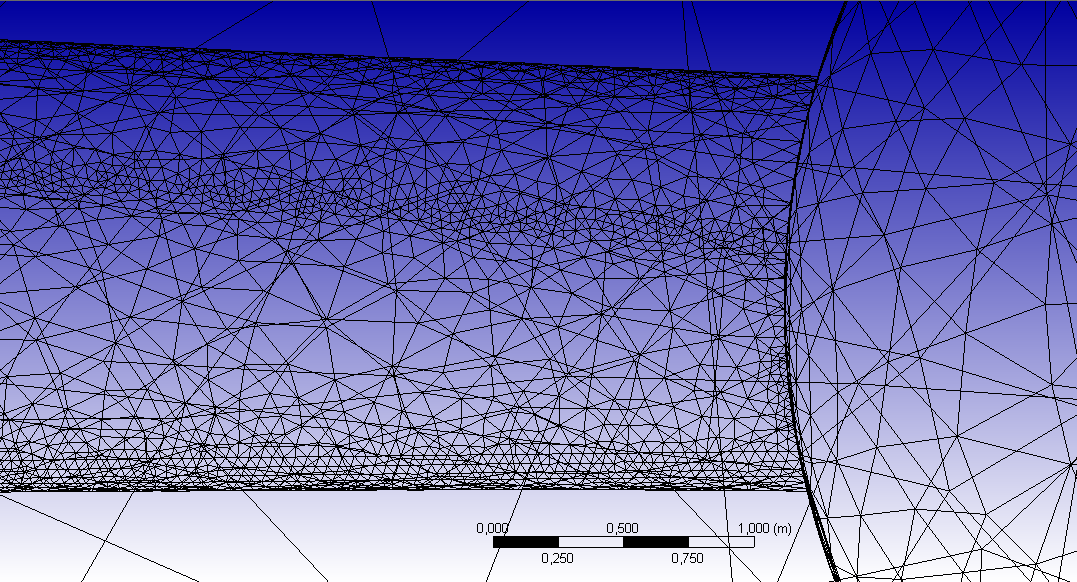
Aerogenerador HAWT JASF CFD Geometry
Si los resultados del CFD son correctos (nótese que el mallado no es fino, elementos > 250 mm), Nodos necesarios ≈ Re ^9/4 ≈ 6E+15 Nodos mallado ≈ 1 E+6 podemos diseñar calculando el par o momento M en:
Vv = 10 m/s λ = TSR ≈ 3,14 utilizando TEP
Vv = 10 m/s λ = TSR ≈ 3,14 utilizando TCM con a ≈ 0,07 constante
Vv = 10 m/s λ = TSR ≈ 3,14 utilizando TMC con a´ ≈ 0,02 constante
Vv = 10 m/s λ = TSR ≈ 3,14 utilizando (TCM+TMC)/2 con a ≈ 0,07 a´ ≈ 0,02 constantes ≈ TEP
0 º < α < 14 º λ = TSR ≈ 3,14 utilizando TCE jasf basada en la Teoría de la Energía Cinética donde
dMFz (Nm) =ρa*Cuerda*sen(α+β)*Vv*(ω+ ω’ )*R^2*dr dẆ ![]() = ω (rd/s) * dMFz (Nm)
= ω (rd/s) * dMFz (Nm)
siendo ω’ = 2 ω ((SEN(α+β)/SENβ)-1)
dando resultados similares a TEP en cuanto a par M y potencia Ẇ
Evidentemente con CL y CD de perfiles sucios, 3 palas de radios de ≈ 60 m y cuerda cte ≈ 4 m.
Cálculo Aerogenerador Horizontal Axis Wind Turbine, HAWT , desing by JASF
| Vv (m/s) | ẆT (Mw) | ẆTEP (Mw) | ẆTCE (Mw) | ẆmLB | Ẇ aire | Cp | TSR | Npp | ωa (rpm) | ω (rpm) | Ϯ |
| 2 | 0,0 | 0,0 | 0,1 | 0,0 | 0,1 | 0,77 | 5,60 | 14 | 214 | 1,71 | 122 |
| 3 | 0,1 | 0,1 | 0,1 | 0,1 | 0,2 | 0,44 | 3,73 | 14 | 214 | 1,71 | 122 |
| 4 | 0,1 | 0,1 | 0,1 | 0,3 | 0,5 | 0,29 | 2,80 | 14 | 214 | 1,71 | 122 |
| 5 | 0,2 | 0,2 | 0,2 | 0,5 | 0,9 | 0,21 | 2,24 | 14 | 214 | 1,71 | 191 |
| 6 | 0,3 | 0,2 | 0,2 | 0,9 | 1,6 | 0,18 | 2,01 | 13 | 231 | 1,85 | 174 |
| 7 | 0,5 | 0,4 | 0,4 | 1,5 | 2,5 | 0,18 | 2,04 | 11 | 273 | 2,18 | 147 |
| 8 | 0,7 | 0,5 | 0,5 | 2,2 | 3,8 | 0,17 | 1,96 | 10 | 300 | 2,40 | 127 |
| 9 | 0,9 | 0,7 | 0,7 | 3,2 | 5,4 | 0,17 | 1,94 | 9 | 333 | 2,67 | 108 |
| 10 | 1,3 | 1,0 | 0,9 | 4,4 | 7,4 | 0,17 | 1,96 | 8 | 375 | 3,00 | 90 |
| 11 | 1,8 | 1,4 | 1,4 | 5,8 | 9,8 | 0,18 | 2,04 | 7 | 429 | 3,43 | 74 |
| 12 | 2,1 | 1,6 | 1,5 | 7,6 | 12,8 | 0,16 | 1,87 | 7 | 429 | 3,43 | 69 |
| 13 | 2,9 | 2,3 | 2,2 | 9,6 | 16,3 | 0,18 | 2,01 | 6 | 500 | 4,00 | 55 |
| 14 | 3,3 | 2,6 | 2,4 | 12,0 | 20,3 | 0,16 | 1,87 | 6 | 500 | 4,00 | 52 |
| 15 | 4,8 | 3,8 | 3,6 | 14,8 | 25,0 | 0,19 | 2,09 | 5 | 600 | 4,80 | 40 |
| 16 | 5,3 | 4,2 | 3,9 | 18,0 | 30,3 | 0,17 | 1,96 | 5 | 600 | 4,80 | 38 |
| 17 | 5,8 | 4,6 | 4,1 | 21,5 | 36,3 | 0,16 | 1,85 | 5 | 600 | 4,80 | 37 |
| 18 | 6,4 | 5,0 | 4,4 | 25,6 | 43,1 | 0,15 | 1,74 | 5 | 600 | 4,80 | 35 |
| 19 | 9,5 | 7,5 | 7,2 | 30,1 | 50,7 | 0,19 | 2,06 | 4 | 750 | 6,00 | 26 |
| 20 | 10,3 | 8,1 | 7,6 | 35,1 | 59,2 | 0,17 | 1,96 | 4 | 750 | 6,00 | 25 |
| 21 | 11,2 | 8,8 | 8,0 | 40,6 | 68,5 | 0,16 | 1,87 | 4 | 750 | 6,00 | 24 |
| 22 | 12,0 | 9,4 | 8,3 | 46,7 | 78,8 | 0,15 | 1,78 | 4 | 750 | 6,00 | 23 |
| 23 | 12,9 | 10,1 | 8,7 | 53,3 | 90,0 | 0,14 | 1,70 | 4 | 750 | 6,00 | 22 |
| 24 | 13,7 | 10,8 | 9,1 | 60,6 | 102,3 | 0,13 | 1,63 | 4 | 750 | 6,00 | 21 |
| 25 | 22,2 | 17,4 | 16,9 | 68,5 | 115,6 | 0,19 | 2,09 | 3 | 1.000 | 8,00 | 15 |
| 26 | 23,6 | 18,5 | 17,6 | 77,0 | 130,0 | 0,18 | 2,01 | 3 | 1.000 | 8,00 | 14 |
| Vpmax= | 52 | Rct= | 125 | 0,21 | 2,20 | ᶆ= | 1,44 | Ϯ= | 14 |
TCE jasf, Theory Kinetics Energy (Teoría de la Energía Cinética) da resultados similares a TEP en el rango Vv = (0 – 20) m/s
TCE jasf dMFz (Nm) =ρa*Cuerda*sen(α+β)*Vv*(ω+ ω’ )*R^2*dr siendo ω’ = 2 ω ((SEN(α+β)/SENβ)-1)

JASF1961 Aerogenerador Potencia vs Velocidad
El punto donde coinciden los resultados de TEP y CFD es λ = TSR ≈ 2,00 resultando:
| ω | ṁ | Npp | λ = TSR | Vv | MFzTotalTEP | MFzTotalCFD | MFzTotalCFD | MTEP/MCFD |
| rd/s | kg/s | Uds | Ratio | m/s | Nm | Nm | Inicial | Ratio |
| 0,180 | 96.495 | 14 | 2,24 | 5 | 1.005.265 | 854.060 | 1,18 | |
| 0,314 | 192.989 | 8 | 1,96 | 10 | 3.954.366 | 3.572.900 | 1,11 | |
| 0,503 | 289.484 | 5 | 2,09 | 15 | 8.561.187 | 7.903.900 | 1,08 | |
| 0,628 | 385.979 | 4 | 1,96 | 20 | 16.135.902 | 14.433.000 | 1,12 | |
| 0,838 | 482.473 | 3 | 2,09 | 25 | 26.444.481 | 22.678.000 | 21.280.000 | 1,17 |
| FTEP | FCFD | FTEP/FCFD | TEP | Cp | CFD | Cp | Cp | TCE jasf | Cp |
| N | N | Ratio | Ẇ |
Ẇ |
Secuencial | Inicializando | Ẇ |
||
| 40.526 | 37.398 | 1,08 | 180.948 | 0,20 | 153.731 | 0,17 | 0,00 | 196.767 | 0,21 |
| 135.757 | 140.060 | 0,97 | 1.241.671 | 0,17 | 1.121.891 | 0,15 | 0,00 | 1.207.617 | 0,16 |
| 259.134 | 327.290 | 0,79 | 4.306.277 | 0,17 | 3.975.662 | 0,16 | 0,00 | 4.635.074 | 0,19 |
| 546.940 | 566.370 | 0,97 | 10.133.346 | 0,17 | 9.063.924 | 0,15 | 0,00 | 9.660.932 | 0,16 |
| 944.273 | 940.960 | 1,00 | 22.160.475 | 0,19 | 19.004.164 | 0,16 | 0,15 | 21.246.778 | 0,18 |

Las predicciones de los modelos matemáticos (TEP, CFD, etc.) en flujos turbulentos son poco aproximadas, aunque en ciertos casos los resultados sean correctos (manteniendo constantes escalas, Re, etc.) tras haber contrastado los modelos con prototipos experimentales.
Esto es debido a la complejidad de las turbulencia, estelas, la creación de vórtices y la separación del flujo en la capa límite.
La turbulencia es, en parte predecible (matemáticamente deducible) y en parte caótica, al azar (NO matemáticamente deducible).
Para un determinado flujo y para números de Reynolds suficientemente pequeños el Flujo es laminar.
Es decir: es estable, y determinista (una solución única para unas mismas condiciones iniciales y de contorno).
Conforme aumenta el número de Reynolds, llega un momento en que el problema se hace inestable:
Aparecen fluctuaciones “rápidas” (frente al tiempo característico) y aleatorias (no deterministas) en el flujo.
Estas perturbaciones tienen la forma de torbellinos.
En dichas condiciones decimos que el flujo es turbulento, al menos en la zona de éste donde aparece el movimiento aleatorio o caótico.
La transición a la turbulencia puede ocurrir “Espacialmente” como en una capa límite o «Temporalmente».
El rango de escalas espaciales es muy grande, desde las escalas comparables con el tamaño de la geometría, hasta las escalas de los torbellinos disipativos (microescalas de Kolmogorov).
El estado caótico de un fluido aparece en una zona del flujo cuando el Reynolds característico excede un determinado valor límite.
Conforme el número de Reynolds aumenta, las fuerzas de inercia (fuerzas no lineales con la velocidad) se hacen más importantes frente las fuerzas viscosas (fuerzas lineales con campo de velocidad ).
Es decir los efectos inerciales, no lineales, frente a los viscosos, lineales, son cada vez más importantes.
Esto produce una desestabilización del flujo que da lugar al fenómeno de la turbulencia.
El ratio entre los tamaños de torbellinos grandes y pequeño es del orden de Re^3/4.
Esta relación puede utilizarse para estimar el número de puntos del mallado computacional.
Como hay 3 dimensiones espaciales el número de puntos es proporcional al Re ^9/4
Las hipótesis de modelado implican que el flujo puede ser descrito como un estado de continua inestabilidad en el flujo, donde aun así es posible separar las fluctuaciones turbulentas del flujo promedio.
Las fluctuaciones deben exhibir cierta clase de equilibrio estadístico para que el modelado sea posible.
Existe evidencia de dicho equilibrio:
Cascada de torbellinos de Kolmogorov
Capa Logarítmica de Prandtl
Modelar la turbulencia es modelar el citado equilibrio en función de propiedades conocidas del flujo.
Idealmente un modelo debe introducir la mínima cantidad de complejidad a la vez que captura lo más esencial de la física relevante del fenómeno.
Si se toma una fotografía de un flujo turbulento, pueden verse “torbellinos” de tamaños muy diferentes, estos torbellinos no son paralelos.
El mecanismo que da lugar a la formación de torbellinos pequeños a partir de torbellinos más grandes se denomina “estiramiento de torbellino” (“vortex stretching”).
Como consecuencia, las longitudes características de los remolinos, y por tanto de cualquier propiedad transportada (concentración, temperatura,…) va desde las longitudes características más grandes (del orden del tamaño del objeto o de la capa límite –flujos externos–, o de la anchura del flujo –flujos internos–) hasta las longitudes características más pequeñas donde su energía cinética es disipada por la viscosidad.
Se dice que hay un “proceso de cascada” que tranfiere la energía cinética fluctuante, desde los torbellinos grandes a los torbellinos pequeños.
Desde los más grandes “Torbellinos contenedores de la energía cinética fluctuante” (Energy containing eddies) , hasta los más pequeños “Torbellinos disipadores de la energía” (Energy dissipating eddies).
Los flujos turbulentos siempre son disipativos.
Los torbellinos grandes transportan consigo a los torbellinos más pequeños, que tardan cierto tiempo en disiparse, mientras son reemplazados por nuevos torbellinos.
Por ejemplo, en una tubería, puede ser necesarios 30 D para que los torbellinos de la entrada desaparezcan. Por lo tanto, el flujo turbulento depende de su historia anterior, y no puede ser directamente modelizado en términos de propiedades locales como en los flujos laminares.
Implica que la turbulencia puede ser modelada en cierta medida: “Todas aquellas escalas en el subrango inercial y disipativo son modelables” !!!.
Subcapa viscosa: flujo pegado a la pared dominado por la viscosidad, que se comporta laminarmente.
Los parámetros característicos son ζw ν y
Flujo exterior: El flujo alejado de la pared, no es turbulento, y viene impuesto por las condiciones exteriores.
Subcapa inercial o Logarítmica:
Entre las dos zonas anteriores, existe una zona donde los efectos viscosos no son importantes, transmite el esfuerzo cortante visto en la pared.
Los parámetros característicos son ζw ν y
Existe un equilibrio universal para la turbulencia que incluye la subcapa logarítmica y la viscosa.
Se ha puesto de manifiesto con el perfil de velocidad, pero afecta a todas las propiedades turbulentas.
El flujo exterior viene determinado por las condiciones exteriores.
Queda justificada la posibilidad de plantear modelos de turbulencia para toda la subcapa inercial y viscosa !!!.
Es posible tener en cuenta el efecto de la pared sin tener que resolver la zona próxima, (perdiendo algo de precisión).
Las funciones de pared (Wall–functions, Launder and Spalding) representan un modelo simplificado de la turbulencia, que tiene en cuenta el comportamiento de U, k y en las proximidades de la pared.
Supone que el flujo próximo a la pared se comporta como una capa límite turbulenta completamente desarrollada y que el nodo más próximo a la pared está en la subcapa logarítmica.
Kolmogorov (1942) define w :
“tasa de disipación de la energía por unidad de volumen y de tiempo”
w puede ser utilizada para definir propiedades turbulentas:
Escala de tiempo de la turbulencia, 1 / w
mixing-length, longitud característica de los torbellinos contenedores de la energía, k ^1/2 / w
De hecho ε = k w
Así la viscosidad turbulenta puede ser formulada en términos de w : νt = Cμ / k w
Hay modelos de turbulencia que modelan ecuaciones para k – w en vez de k – ε
denominados modelos two-equation k – w RANS ( Reynolds Averaged Navier Stokes equations) , los más notables:
Wilcox k – w
STT k – w
La característica más importante de estos modelos es que pueden reproducir tensores de esfuerzos de Reynolds no isótropos, que son frecuentes en flujos que tienen una tridimensionalidad importante:
Unión entre ala y avión.
Coche de F1.
Turbomáquinas…
Existen versiones “Low–Reynolds” y con modelo de pared, como en los k – ε.
En este último caso los modelos deben ser más ricos ya que deben proveerse condiciones de contorno para UU , en vez de sólamente para k, tal y como se ha visto.
Javier Ros Aerodinámica y Mecánica de Fluidos Computacional
Departamento de Ingeniería Mecánica Universidad Pública de Navarra 3 de Octubre de 2007
MODELO 1 CFD Solver: Steady State Stationary (Estado Estable Estacionario). Turbulence: k-w SST Wall Funcion
Geometry : rotor tripala radio 62 m cuerda cte. 4 m Mesh Geometry: 650000 m3 ≈ 1 E+6 Nodes ≈ 6 E+6 Elements
Perfomance: CPU: 8 cores Parallel Residual ≈ 1 E-4 Converged ≈ 25 – 30 it ≈ 20 minutes / per velocity


Aerogenerador HAWT JASF CFD w 0.419 rd s-1 Vv 10 ms-1

Aerogenerador HAWT JASF CFD w 0,279 rd s-1 Vv 5 ms-1

Aerogenerador HAWT JASF CFD w 0.503 rd s-1 Vv 10 ms-1
Vv = 10 m/s ω = 0,503 rd/s
Pressure Force Rotor 1.8602 E+05 N
Pressure Moment Rotor 2.7767 E+06 Nm Mt = 2,78 E6 Nm Ẇ = 0,503 * 2,78 E6= 1,4 Mw

Aerogenerador HAWT JASF CFD w 0,838 rd s-1 Vv 15 ms-1

Aerogenerador HAWT JASF CFD w 0,838 rd s-1 Vv 20 ms-1
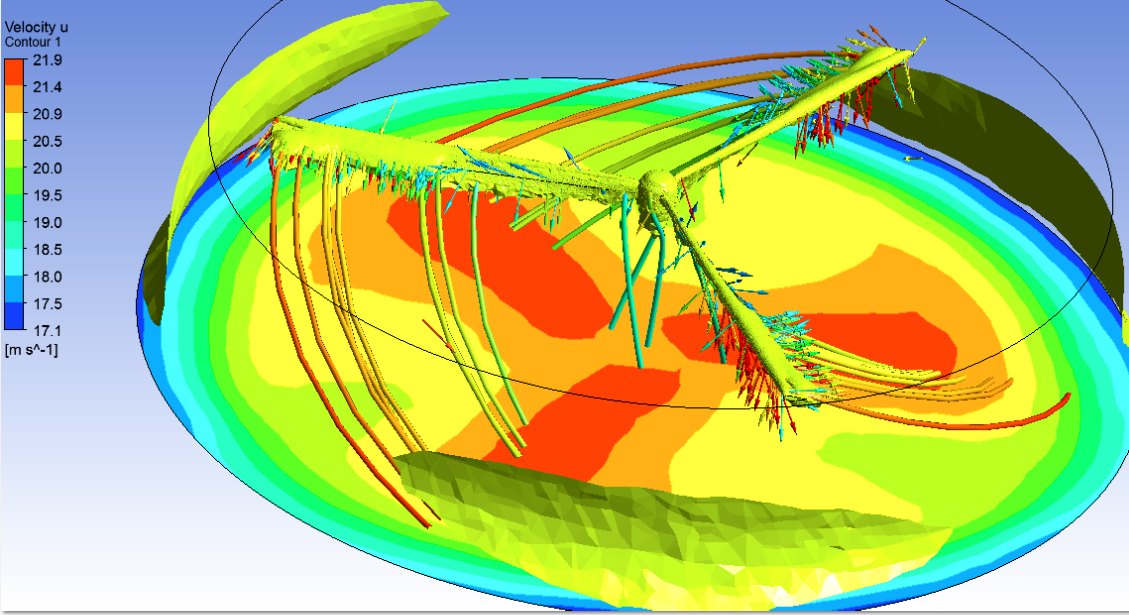
Aerogenerador HAWT JASF CFD w 0,838 rd s-1 Vv 25 ms-1
MODELO 2 CFD Domain: 1/3 del rotor. Solver: Transient Turbulence: k-w SST Wall Funcion
Volumen de Control: 1/3 de Tronco de Cono, con 1/3 de Disco (envolviendo a la pala) que gira
Geometry : 1/3 rotor tripala Mesh Geometry: 220000 m3 ≈ 0,2 E+6 Nodes ≈ 1 E+6 Elements
Perfomance: CPU: 4 cores Parallel Residual ≈ 1 E-4 Converged ≈ 5 it ≈ 8 minutes / per velocity

Aerogenerador HAWT JASF CFD Mesh Transient Periodicity

Aerogenerador HAWT JASF CFD w 0.503 rd s-1 Vv 10 ms-1 Transient Periodicity
Vv = 10 m/s ω = 0,503 rd/s
Pressure Force Rotor 2.0251E+04 N
Pressure Moment Rotor 1.7886E+05 Nm Mt = 3 * 1,7886 E5 = 5,36 E5 Nm Ẇ = 0,503 * 5,36 E5 = 0,3 Mw
El Modelo 1 es más sencillo de construir y proporciona resultados “más acordes a la realidad” que el Modelo 2.
MODELOS . Comparativa de modelos: sencillez, gasto computacional, precisión, etc
Modelo 1 “Name AEROGENERADOR” Steady. Volumen de Control Tronco de Cono,
r = 72 m, R = 80 m, L = 40 m, sólo fluido.

Aerogenerador HAWT JASF CFD Input Pressure Gradient Aerogenerador
Modelo 2 “Name ROTOR” Transient, Volumen de Control 1/3 (Periodic Boundary) de Tronco de Cono,
r = 72 m, R = 80 m, L = 40 m, con un Disco inscrito envolviendo al rotor, fluido bizona (Cono/Disco).

Aerogenerador HAWT JASF CFD Input Pressure Gradient Rotor
Modelo 3 “Name RIGID” = Idem MODELO 1 pero con fluido y rotor sólido.

Aerogenerador HAWT JASF CFD Input Pressure Gradient Rigid
El Modelo 3 da resultados similares al Modelo 1 pero consume más recursos computacionales.
Modelo 4 “Name Aerogenerador Tercio” Volumen de Control 1/3 (Periodic Boundary) de Tronco de Cono,
r = 72 m, R = 80 m, L = 40 m, sólo fluido.
CFD Solver: Steady State Turbulence: k-w SST Wall Funcion
Geometry : rotor tripala Domain: 1/3 del rotor. Mesh Geometry: 220000 m3 ≈ 3 E+5 Nodes ≈ 2 E+6 Elements
Perfomance: CPU: 8 cores Parallel Residual ≈ 1 E-4 Converged ≈ 33 it ≈ 7 minutes / per velocity
Los resultados son similares al Modelo 1 pero con menos consumo de memoria y tiempo.
Por tanto el mejor de los cuatro modelos anteriores ( 1 – 2 – 3 – 4 ) es el Modelo 4 “Name Aerogenerador Tercio”

Aerogenerador HAWT JASF CFD Input Pressure Gradient Aerogenerador Tercio
Sobre la base del Modelo 4 variamos el solver y otros parámetros:
Modelo 5 “Name Aerogenerador Tercio”
CFD Solver: Steady State Turbulence: Reynolds Stress Ideal Gas Total Energy Viscous Wall Funcion
Perfomance: CPU: 8 cores Parallel Residual ≈ 1 E-4 Converged ≈ 47 it ≈ 15 minutes / per velocity
Modelo 6 “Name Aerogenerador Tercio”
CFD Solver: Steady State Turbulence: Reynolds Stress Air Non Energy Non Viscous Wall Funcion
Modelo 7 “Name Aerogenerador Tercio” Mesh más fina: 220000 m3 ≈ 6 E+5 Nodes ≈ 3 E+6 Elements
Los modelos 3 4 5 6 7 dan resultados similares:
| ω | ṁ | λ = TSR | Vv | MFzTotalTEP | MFzTotalCFD | MTEP/MCFD | |
| Mod | rd/s | kg/s | Ratio | m/s | Nm | Inicial | Ratio |
| 1 | 0,503 | 192.989 | 3,14 | 10 | 5.025.817 | 2.776.700 | 1,81 |
| 2 | 0,503 | 64.330 | 3,14 | 10 | 5.025.817 | 2.330.000 | 2,16 |
| 3 | 0,503 | 192.989 | 3,14 | 10 | 5.025.817 | 2.910.000 | 1,73 |
| 4 | 0,503 | 64.330 | 3,14 | 10 | 5.025.817 | 2.920.000 | 1,72 |
| 5 | 0,503 | 64.330 | 3,14 | 10 | 5.025.817 | 2.880.000 | 1,75 |
| 6 | 0,503 | 64.330 | 3,14 | 10 | 5.025.817 | 2.950.000 | 1,70 |
| 7 | 0,503 | 64.330 | 3,14 | 10 | 5.025.817 | 2.950.000 | 1,70 |
Sobre la base del Modelo 4 variamos otros parámetros del Volumen de Control:
Modelos 8 – 21 : con el Modelo 4 “Name Aerogenerador Tercio” variando el Volumen de Control:
| Mod | r | ṁ | Ψ | Lo | Lf | MFzTotalTEP | MFzTotalCFD | MTEP/MCFD | TEP | Cp | CFD | Cp |
| 8 | 72 | 64.330 | 10 | -10 | 40 | 5.025.817 | 2.620.000 | 1,92 | 2.527.986 | 0,34 | 1.317.860 | 0,18 |
| 9 | 74 | 67.953 | 10 | -3 | 35 | 5.025.817 | 2.930.000 | 1,72 | 2.527.986 | 0,34 | 1.473.790 | 0,20 |
| 10 | 62 | 47.701 | 10 | -3 | 15 | 5.025.817 | 3.090.000 | 1,63 | 2.527.986 | 0,34 | 1.554.270 | 0,21 |
| 11 | 62 | 47.701 | 20 | -3 | 30 | 5.025.817 | 3.090.000 | 1,63 | 2.527.986 | 0,34 | 1.554.270 | 0,21 |
| 12 | 62 | 47.701 | 20 | -3 | 50 | 5.025.817 | 3.100.000 | 1,62 | 2.527.986 | 0,34 | 1.559.300 | 0,21 |
| 13 | 65 | 52.429 | 20 | -3 | 25 | 5.025.817 | 3.070.000 | 1,64 | 2.527.986 | 0,34 | 1.544.210 | 0,21 |
| 14 | 65 | 52.429 | 20 | -2 | 25 | 5.025.817 | 3.220.000 | 1,56 | 2.527.986 | 0,34 | 1.619.660 | 0,22 |
| 15 | 65 | 52.429 | 20 | -1,5 | 25 | 5.025.817 | 3.330.000 | 1,51 | 2.527.986 | 0,34 | 1.674.990 | 0,23 |
| 16 | 70 | 60.806 | 20 | -2 | 50 | 5.025.817 | 3.180.000 | 1,58 | 2.527.986 | 0,34 | 1.599.540 | 0,22 |
| 17 | 62 | 47.701 | 20 | -2 | 25 | 5.025.817 | 3.240.000 | 1,55 | 2.527.986 | 0,34 | 1.629.720 | 0,22 |
| 18 | 65 | 52.429 | 20 | -2 | 25 | 5.025.817 | 3.210.000 | 1,57 | 2.527.986 | 0,34 | 1.614.630 | 0,22 |
| 19 | 65 | 52.429 | 20 | -1,2 | 25 | 5.025.817 | 3.450.000 | 1,46 | 2.527.986 | 0,34 | 1.735.350 | 0,23 |
| 20 | 65 | 52.429 | 20 | -2 | 25 | 5.025.817 | 3.240.000 | 1,55 | 2.527.986 | 0,34 | 1.629.720 | 0,22 |
| 21 | 65 | 52.429 | 20 | -2 | 20 | 5.025.817 | 3.120.000 | 1,61 | 2.527.986 | 0,34 | 1.569.360 | 0,21 |
Nos quedamos con éste Modelo 21 “Name Aerogenerador Tercio”
Volumen de Control 1/3 (Periodic Boundary) de Tronco de Cono, r = 65 m Ψ = 20º L = 22 m sólo fluido.
CFD Solver: Steady State Turbulence: k-w SST Wall Funcion
Geometry : rotor tripala Domain: 1/3 del rotor. Mesh Geometry: 100000 m3 ≈ 3 E+5 Nodes ≈ 2 E+6 Elements
Perfomance: CPU: 8 cores Parallel Residual ≈ 1 E-4 Converged ≈ 33 it ≈ 7 minutes / per velocity
Para Vv = 10 m/s y varias ω
| ω | ṁ | Npp | λ = TSR | Vv | MFzTotalTEP | MFzTotalCFD | MTEP/MCFD | TEP | Cp | CFD | Cp | |
| rd/s | kg/s | Uds | Ratio | m/s | Nm | Inicial | Ratio | Ẇ |
Ratio | Ẇ |
Ratio | |
| 1,013 | 52.429 | 5 | 6,32 | 10 | 6.346.292 | 882.000 | 7,20 | 6.428.794 | 0,87 | 893.466 | 0,12 | |
| Mod 21 | 0,503 | 52.429 | 5 | 3,14 | 10 | 5.025.817 | 3.120.000 | 1,61 | 2.527.986 | 0,34 | 1.569.360 | 0,21 |
| 0,251 | 52.429 | 10 | 1,56 | 10 | 3.581.054 | 4.280.000 | 0,84 | 898.845 | 0,12 | 1.074.280 | 0,15 |
comprobamos que la potencia máxima a 10 m/s es para ω = 0,503 rd/s λ = TSR ≈ 3,14
Calculamos para distintas Velocidades del viento Vv con λ = TSR ≈ 3,14 y sin exceder la Vp = 65 m/s
| ω | ṁ | Npp | λ = TSR | Vv | MFzTotalTEP | MFzTotalCFD | MTEP/MCFD | TEP | Cp | CFD | Cp | |
| rd/s | kg/s | Uds | Ratio | m/s | Nm | Inicial | Ratio | Ẇ |
Ratio | Ẇ |
Ratio | |
| Mod 21 | 0,279 | 26.215 | 9 | 3,49 | 5 | 1.312.794 | 696.000 | 1,89 | 366.270 | 0,40 | 194.184 | 0,21 |
| Mod 21 | 0,503 | 52.429 | 5 | 3,14 | 10 | 5.025.817 | 3.060.000 | 1,64 | 2.527.986 | 0,34 | 1.539.180 | 0,21 |
| Mod 21 | 0,838 | 78.644 | 3 | 3,49 | 15 | 11.815.145 | 6.240.000 | 1,89 | 9.901.092 | 0,40 | 5.229.120 | 0,21 |
| Mod 21 | 0,838 | 104.859 | 3 | 2,61 | 20 | 18.618.446 | 14.000.000 | 1,33 | ####### | 0,26 | ####### | 0,20 |
| Mod 21 | 0,838 | 131.073 | 3 | 2,09 | 25 | 26.444.481 | 23.600.000 | 1,12 | ####### | 0,19 | ####### | 0,17 |

Aerogenerador HAWT JASF CFD Input Pressure Gradient Aerogenerador Tercio Mod 8

Aerogenerador HAWT JASF CFD Input Pressure Gradient Aerogenerador Tercio Mod 15

Aerogenerador HAWT JASF CFD Aerogenerador Tercio Mod 21 w 0,279 rd s-1 Vv 5 ms-1

Aerogenerador HAWT JASF CFD Aerogenerador Tercio Mod 21 w 0,503 rd s-1 Vv 10 ms-1

Aerogenerador HAWT JASF CFD Aerogenerador Tercio Mod 21 w 0,838 rd s-1 Vv 15 ms-1

Aerogenerador HAWT JASF CFD Aerogenerador Tercio Mod 21 w 0,838 rd s-1 Vv 20 ms-1
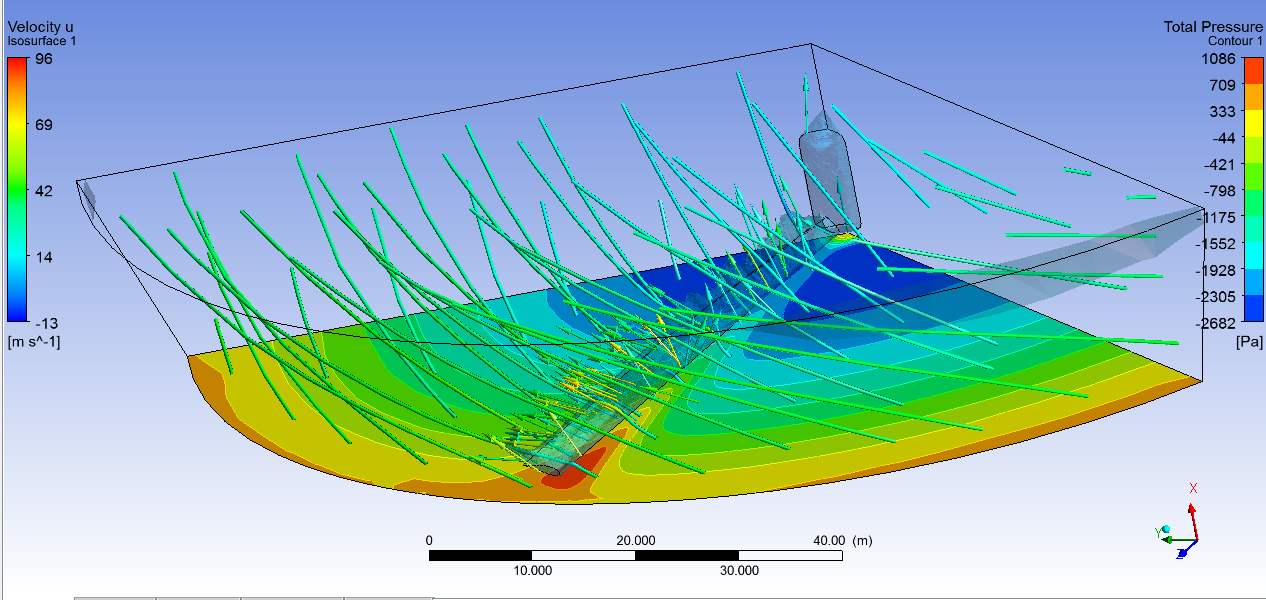
Aerogenerador HAWT JASF CFD Aerogenerador Tercio Mod 21 w 0,838 rd s-1 Vv 25 ms-1
Análisis Dimensional. Teoría de Modelos
Vamos a comparar TEP y CFD en un aerogenerador la mitad de grande, es decir, a escala E = 1 : 2 E = 0,5 = 1/2
Si mantenemos el resto de propiedades en modelo y prototipo (fluido, densidad, viscosidad, velocidades, etc) el análisis dimensional predice que las fuerzas, momentos y potencia serán proporcionales al cuadrado de la escala:
Fprototipo = E2 * Fmodelo Mprototipo = E2 * Mmodelo Ẇprototipo = E2 * Ẇmodelo E2 = 0,52 = 0,25
Fprototipo = 0,25 * Fmodelo Mprototipo = 0,25 * Mmodelo Ẇprototipo = 0,25 * Ẇmodelo
Para TEP tenemos:
| Vv (m/s) | ẆT (Mw) mod | ẆT (Mw) AD |
| 2 | 0,1 | 0,0 |
| 3 | 0,1 | 0,0 |
| 4 | 0,2 | 0,1 |
| 5 | 0,4 | 0,1 |
| 6 | 0,6 | 0,1 |
| 7 | 0,9 | 0,2 |
| 8 | 1,4 | 0,3 |
| 9 | 2,1 | 0,5 |
| 10 | 2,5 | 0,6 |
| 11 | 4,0 | 1,0 |
| 12 | 4,6 | 1,2 |
| 13 | 5,2 | 1,3 |
| 14 | 5,9 | 1,5 |
| 15 | 9,9 | 2,5 |
| 16 | 11,0 | 2,7 |
| 17 | 12,1 | 3,0 |
| 18 | 13,2 | 3,3 |
| 19 | 14,4 | 3,6 |
| 20 | 15,6 | 3,9 |
| 21 | 16,8 | 4,2 |
| 22 | 18,1 | 4,5 |
| 23 | 19,4 | 4,9 |
| 24 | 20,8 | 5,2 |
| 25 | 22,2 | 5,5 |
Ejecutando la hoja de cálculo con una pala de longitud Rma = 31 m y cuerda 2 m
comprobamos que los resultados de TEP coinciden con la teoría de modelos del Análisis Dimensional:
| Vv (m/s) | ẆT (Mw) pro | ẆTEP (Mw) | ẆTCE (Mw) | ẆmLB | Ẇ aire | Cp | TSR | Npp | ωa (rpm) | ω (rpm) | Ϯ |
| 2 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | 1,20 | 15,68 | 10 | 300 | 4,80 | 122 |
| 3 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | 0,70 | 10,46 | 10 | 300 | 4,80 | 122 |
| 4 | 0,1 | 0,0 | 0,1 | 0,1 | 0,1 | 0,47 | 7,84 | 10 | 300 | 4,80 | 122 |
| 5 | 0,1 | 0,1 | 0,1 | 0,1 | 0,2 | 0,40 | 6,97 | 9 | 333 | 5,33 | 248 |
| 6 | 0,1 | 0,1 | 0,1 | 0,2 | 0,4 | 0,36 | 6,53 | 8 | 375 | 6,00 | 208 |
| 7 | 0,2 | 0,2 | 0,2 | 0,4 | 0,6 | 0,35 | 6,40 | 7 | 429 | 6,86 | 169 |
| 8 | 0,3 | 0,3 | 0,3 | 0,6 | 0,9 | 0,36 | 6,53 | 6 | 500 | 8,00 | 132 |
| 9 | 0,5 | 0,4 | 0,5 | 0,8 | 1,3 | 0,40 | 6,97 | 5 | 600 | 9,60 | 98 |
| 10 | 0,6 | 0,5 | 0,6 | 1,1 | 1,8 | 0,34 | 6,27 | 5 | 600 | 9,60 | 94 |
| 11 | 1,0 | 0,8 | 1,0 | 1,5 | 2,5 | 0,41 | 7,13 | 4 | 750 | 12,00 | 66 |
| 12 | 1,2 | 0,9 | 1,1 | 1,9 | 3,2 | 0,36 | 6,53 | 4 | 750 | 12,00 | 63 |
| 13 | 1,3 | 1,0 | 1,2 | 2,4 | 4,1 | 0,32 | 6,03 | 4 | 750 | 12,00 | 61 |
| 14 | 1,5 | 1,2 | 1,3 | 3,0 | 5,1 | 0,29 | 5,60 | 4 | 750 | 12,00 | 59 |
| 15 | 2,5 | 1,9 | 2,5 | 3,7 | 6,2 | 0,40 | 6,97 | 3 | 1.000 | 16,00 | 38 |
| 16 | 2,7 | 2,2 | 2,6 | 4,5 | 7,6 | 0,36 | 6,53 | 3 | 1.000 | 16,00 | 36 |
| 17 | 3,0 | 2,4 | 2,8 | 5,4 | 9,1 | 0,33 | 6,15 | 3 | 1.000 | 16,00 | 35 |
| 18 | 3,3 | 2,6 | 3,0 | 6,4 | 10,8 | 0,31 | 5,81 | 3 | 1.000 | 16,00 | 34 |
| 19 | 3,6 | 2,8 | 3,2 | 7,5 | 12,7 | 0,28 | 5,50 | 3 | 1.000 | 16,00 | 33 |
| 20 | 3,9 | 3,1 | 3,3 | 8,8 | 14,8 | 0,26 | 5,23 | 3 | 1.000 | 16,00 | 32 |
| 21 | 4,2 | 3,3 | 3,5 | 10,1 | 17,1 | 0,25 | 4,98 | 3 | 1.000 | 16,00 | 31 |
| 22 | 4,5 | 3,6 | 3,7 | 11,7 | 19,7 | 0,23 | 4,75 | 3 | 1.000 | 16,00 | 30 |
| 23 | 4,9 | 3,8 | 3,9 | 13,3 | 22,5 | 0,22 | 4,55 | 3 | 1.000 | 16,00 | 30 |
| 24 | 5,2 | 4,1 | 4,0 | 15,1 | 25,6 | 0,20 | 4,36 | 3 | 1.000 | 16,00 | 29 |
| 25 | 5,5 | 4,4 | 4,2 | 17,1 | 28,9 | 0,19 | 4,18 | 3 | 1.000 | 16,00 | 28 |
¿ Qué resultados arrojará el CFD ? Veámoslo.
Hacemos el escalado geométrico y aumentamos la definición del mallado.
| ω | ṁ | Npp | λ = TSR | Vv | MFzTotalTEP | MFzTotal AD | MFzTotal pro | M AD/M pro | TEP | Cp | CFD | Cp | |
| rd/s | kg/s | Uds | Ratio | m/s | Nm | Inicial | Inicial | Ratio | Ẇ |
Ratio | Ẇ |
Ratio | |
| 0,558 | 6.554 | 9 | 3,49 | 5 | 328.198 | 174.000 | 106.000 | 1,64 | 183.135 | 0,20 | 59.148 | 0,06 | |
| 1,006 | 13.107 | 5 | 3,14 | 10 | 1.256.454 | 765.000 | 459.000 | 1,67 | 1.263.993 | 0,17 | 461.754 | 0,06 | |
| Mod pro | 1,676 | 19.661 | 3 | 3,49 | 15 | 2.363.029 | 1.560.000 | 942.000 | 1,66 | 3.960.437 | 0,16 | 1.578.792 | 0,06 |
| 1,676 | 26.215 | 3 | 2,61 | 20 | 4.654.611 | 3.500.000 | 2.040.000 | 1,72 | 7.801.129 | 0,13 | 3.419.040 | 0,06 | |
| 1,676 | 32.768 | 3 | 2,09 | 25 | 6.611.120 | 5.900.000 | 3.510.000 | 1,68 | 11.080.237 | 0,10 | 5.882.760 | 0,05 |
| MFzTotal mod | MFzTotal AD | MFzTotal pro | M AD/M pro |
| Inicial | Inicial | Inicial | Ratio |
| 696.000 | 174.000 | 106.000 | 1,64 |
| 3.060.000 | 765.000 | 459.000 | 1,67 |
| 6.240.000 | 1.560.000 | 942.000 | 1,66 |
| 14.000.000 | 3.500.000 | 2.040.000 | 1,72 |
| 23.600.000 | 5.900.000 | 3.510.000 | 1,68 |
comprobamos que los resultados de CFD NO coinciden con la teoría de modelos del Análisis Dimensional con variaciones en torno a un ratio de ≈ 1,67.
Graficamos los contornos de la velocidad axial vx = u en una isosurface (wall distance = 0,1 m de la pala).

Aerogenerador HAWT JASF CFD Aerogenerador Tercio Mod 21 w 0,503 rd s-1 Vv 10 ms-1 Velocidad Axial x (u)
Graficamos los contornos de la velocidad tangencial vy = v en una isosurface (wall distance = 0,1 m de la pala). 
Aerogenerador HAWT JASF CFD Aerogenerador Tercio Mod 21 w 0,503 rd s-1 Vv 10 ms-1 Velocidad Tangencial y (v)
Detalle de las pérdidas de sustentación en la punta de la pala, debido a la circulación radial del aire entre las caras del intradós y del extradós.
Graficamos los contornos de la velocidad radial vz = w en una isosurface (wall distance = 0,1 m de la pala).

Aerogenerador HAWT JASF CFD Aerogenerador Tercio Mod 21 w 0,503 rd s-1 Vv 10 ms-1 Perdidas en punta Velocidad Radial z ![]()
Al día de hoy, no se ha encontrado la solución analítica de las ecuaciones de Navier – Stokes, que son NO lineales.
Los modelos empleados (CFD y similares) para solucionar las ecuaciones de Navier – Stokes son lineales.
Esto implica que arrastran un error de cálculo de celda en celda.
Cuanto más fino sea el mallado menor será el error, pero existirá.
Para conseguir resultados realistas los ordenadores deberían tener una potencia (velocidad y memoria) del orden de un millón superior a los actuales.
El sofware basado en sistemas Eulerianos (el sistema de referencia son puntos fijos del espacio) necesita una malla espacial previa para resolver las Ecuaciones de Navier – Stokes (ENS) en cada celda.
Los solvers resuelven las ENS, en el Volumen de Control, en el centro de cada celda, en los nudos, etc., (volúmenes finitos, FEM, diferencias finitas, etc.), siendo distintos necesitan gran capacidad de computación, que no está disponible al día de hoy, haciendo que los CFD proporcionen resultados “aproximados”.
Otro tipo de software está basado en sistemas Lagrangianos (el sistema de referencia está ligado a partículas que se desplazan en el espacio). Los solvers que resuelven las ENS no necesitan mallado previo, lo recalculan en cada iteración. Se pueden basar en los flujos a través de las caras de las celdas y también necesitan gran capacidad de computación.
Por otra parte, la turbulencia tiene componentes modelables (deterministas, solucionable analíticamente – con fórmulas-).
Pero tiene otra componente No modelable, ya que depende del azar (caos, NO determinista, NO solucionable analíticamente – con fórmulas-), si bien, sigue un patrón como el humo de un cigarrillo en un cenicero que pasa de laminar a turbulento haciendo vórtices que cambian en el espacio y en el tiempo.
En los flujos turbulentos interesantes desde el punto de vista de la ingeniería (aviones, bombas, hélices, etc) las estelas son características del flujo y poco cambian a grandes rasgos (son siempre parecidas), si bien las pequeñas turbulencias si son azarosas.
En cualquier caso los Grandes Torbellinos (Large Eddy Scale, Large Eddy Simulation, LES) transportan la energía y derivan en pequeños torbellinos que terminan haciéndose microscópicos (cascadas de Kolmologrof) y mediante la viscosidad (rozamientos) transforman la energía cinética en calorífica con pequeños aumentos de la temperatura, hasta que finalmente el flujo se hace laminar (esto sucede muy lejos en el espacio y muy tarde en el tiempo).
Por tanto, para modelar todo esto, necesitaríamos un Volumen de Control megagrande (espacio) y una Transición megagrande (tiempo), unido a un mallado megafino.
El mod 21 tiene un volumen de ≈ 100.000 m3 y el mod 1 ≈ 500.000 m3
El número de Avogadro NA ≈ 6 * 1023 indica que en un mol de aire (en ≈ 0,029 kg , en ≈ 0,016 m3) hay 6 * 1023 moléculas (bolitas).
El mod 21 tiene ≈ 3,75 * 1030 = 35750.0004000.0003000.0002000.0001000.000 = 3,75 quintillones de moléculas (bolitas), que interaccionan unas con otras (aparte de vibrar como locas), intercambiando energías , bocadillos, cromos y sabe Dios que más…
En la mecánica clásica, para resolver la colisión de 2 bolitas en el espacio tridimensional necesitamos:
* una ecuación escalar del teorema de la conservación de la energía (cinética, potencial, térmica…)
* más una ecuación vectorial (3D => 3 ecuaciones escalares X,Y,Z) del teorema de la conservación de la cantidad de movimiento.
Como no se puede resolver de esta forma, se emplea la mecánica de fluidos, dónde el fluido es un medio continuo (no bolitas).
Esta interpretación permite resolver el problema globalmente, a costa de una pérdida de exactitud local, inherente al modelo, que se puede intentar aproximar mediante la laplaciana, que mide la anomalía local de una función en un punto, pero para ello necesitamos conocer dicha función y en las proximidades de los objetos su morfología a escala microscópica (en los casos reales no disponemos de dicha información).
En las zonas fronterizas del fluido con un sólido, el cambio de flujo laminar a turbulento sucede en una región microscópica del espacio denominada capa límite, donde se desprende el flujo del objeto.
En esta zona es importante la micromorfología del sólido (rugosidad) y los “surcos, canales y guías” que nos inventemos para evitar/retardar dicho desprendimiento del flujo (aparte de la curvatura del objeto que es fundamental).
En este aspecto si son importantes los análisis CFD, si bien no nos proporcionan resultados exactos/realistas si nos permiten mejorar el modelo (perfil alar, álabes, hélices, aerodinámica de vehículos, etc), retrasando en el tiempo y en el espacio dicho desprendimiento.
A veces, una turbulencia inducida permite disminuir el Drag (hoyuelos de las pelotas de golf), disminuyendo la turbulencia global, aunque no parezca lógico.
Como los perfiles alares se basan en la sustentación (Lift Force) y para que ésta tenga lugar con un valor útil (elevado), es necesario una elevada diferencia de presiones entre las dos caras del perfil (intradós y extradós) y por tanto, según Bernoulli, una notable diferencia de velocidades, es inevitable que a la salida del perfil se reencuentren dos flujos con partículas a distintas velocidades que inexorablemente (aun siendo ambos laminares) ocasionarán un remolino, torbellino, vórtice,… en definitiva una turbulencia, que según el valor del Re y de la viscosidad local será despreciable (flujo laminar) o apreciable (flujo turbulento).
To date, it has not found the analytical solution of the Navier – Stokes equations, which are NOT linear.
The models used (CFD and the like) to solve the Navier – Stokes equations are linear.
This involves dragging a miscalculation from cell to cell.
The thinner it is the lower plain is the error, but exist.
To achieve realistic results computers should have a power (speed and memory) by more than a million today.
The Eulerian-based software systems (the reference system are fixed points in space) require prior spatial mesh to solve the Navier – Stokes (ENS) in each cell. The solvers solve the ENS, in Volume Control, in the center of each cell, at the nodes, etc.. (Finite volume, FEM, finite differences, etc..), With different require large computing power, which is not available today, making CFD provide «approximate» results.
Other software systems based on Lagrangian (the reference is bound to particles moving in space). The solvers that resolve the ENS do not need prior meshing, it recalculated at each iteration, can be based on the fluxes through the faces of the cells and also require large computing power.
Moreover, the turbulence has modellable components (deterministic, analytically solvable – formulas-).
But it has another component not be modeled, since it depends on chance (chaos, NO deterministic, NO solvable analytically – formulas-), although it follows a pattern like the smoke of a cigarette in an ashtray that goes from laminar to turbulent doing vortices which change in space and time.
In interesting from the point of view of engineering (aircraft, pumps, propellers, etc.) the wake turbulent flow is flow characteristics and little change roughly (are always similar), while if small turbulences are random.
In any event the Big Whirlwinds (Large Eddy Scale) carry energy and result in little whirlwinds that they end up microscopic (Kolmologrof cascades) and by the viscosity (friction) transform the kinetic energy into heat with small temperature increases until eventually the flow becomes laminar (this happens far away in space and in time very late).
Therefore, to model this, we need a megagrande Volume Control (space) and a Transition megagrande (time), together with a plain megafino.
The mod 21 has a volume of ≈ 100,000 m3 and 500,000 m3 mod 1 ≈
Avogadro’s number NA ≈ 6 * 1023 indicates that one mole of air (≈ 0,029 kg, ≈ 0,016 m3) there are 6 * 1023 molecules (balls).
The mod 21 is ≈ 3.75 * 1030 = 35750.0004000.0003000.0002000.0001000.000 = 3.75 quintillion molecules (balls), which interact with each other, exchanging energy (besides vibrate like crazy), snacks, cards and God knows more …
In classical mechanics, to solve the collision of two balls in three-dimensional space we need:
* A scalar equation of the theorem of the conservation of energy (kinetic, potential, thermal …)
* Plus a vector equation (3D => 3 scalar equations X, Y, Z) of the theorem of the conservation of momentum.
As it can not solve this way, fluid mechanics are used, where the fluid is a continuous medium (no pellet).
This interpretation allows to solve the problem globally, at the expense of a loss of local accuracy inherent in the model, which can be approximated by the Laplacian try, which measures the local anomaly of a function at a point, but we need to know the function and nearby objects morphology on a microscopic scale (in real cases do not have this information).
In the border areas of the fluid with a solid, changing laminar to turbulent flow occurs in a microscopic region of space called boundary layer where the flow emerges from the object.
In this area the micromorphology of the solid (roughness) and «grooves, channels and guides» that we invent to prevent / retard this flow detachment (apart from the curvature of the object that is fundamental) is important.
In this regard if the CFD analysis are important, but do not give us accurate / realistic results if we can improve the model (airfoil blades, propellers, aerodynamics of vehicles, etc.), delaying the time and the space evolution .
Sometimes, one can reduce the turbulence-induced drag (dimpled golf balls), reducing overall turbulence, but does not seem logical.
Since the airfoils are based on the support (Lift Force) and it takes place with a useful value (high), it is necessary a high pressure differential on the two sides of the profile (and bottom surface) and therefore, according Bernoulli, a noticeable difference in speed, it is inevitable that the profile output two streams reunite with particles at different speeds inexorably (though both of laminar) they will cause a whirlpool, whirlpool, vortex, … ultimately turbulence, which the value of Re and the local viscosity will be negligible (laminar flow) or significant (turbulent flow).
Existe un paralelismo entre la fuerza de rozamiento entre sólidos: Frozmax > Froz = μroz N = μroz A P > Frozdes
y la fuerza de rozamiento en fluidos debida a la viscosidad: Fvismax > Fvis = μvis A u/h = μvis A ∂u/∂y > Fturbulento
Tanto μroz como μvis dependen fundamentalmente del material y en menor medida de la Temperatura.
Ambas Froz Fvis no pueden superar un valor máximo Frozmax Fvismax
y si esto sucede cambia la situación deslizamiento turbulencia.
Ambas son muy difíciles de cuantificar (Ver Neumáticos Tyres F1, Grip, Agarre, Adherencia : Un parámetro fundamental es el coeficiente de adherencia (de rozamiento, grip), que a su vez depende del tipo de compuesto (goma – caucho – : blando, medio, duro), de la Fuerza Normal, de la Tempetatura, de la Presión, del ángulo de deslizamiento, del ángulo de caída, del ángulo de convergencia,… y del desgaste, que a su vez es función del tiempo y de los esfuerzos soportados.)También sucede en ambos casos que cuando se opera cerca del límite Frozmax Fvismax
es muy fácil sobrepasarlo deslizamiento turbulencia dando como resultado lo que no queremos que suceda.
En la Fórmula 1 el piloto reacciona inmediatamente ante esta situación, pero el perfil alar no lo hace por lo cual
es mejor NO ir al límite en el diseño aerodinámico.
La resistencia aerodinámica de un perfil alar es debida , fundamentalmente:
al rozamiento en la capa límite (régimen laminar)
y a las turbulencias, estelas (régimen turbulento) de la punta de pala y borde de fuga del perfil principalmente.
La transición de régimen laminar a turbulento depende de:
Re, Nº de Reynolds
I, Intensidad de la turbulencia
E, Escala de la turbulencia
Ɛ, Rugosidad del material
C, Curvatura del perfil
ΔP, Gradiente de presiones ≡ distribución de velocidades
Un aumento de Re↑ I↑ Ɛ↑ C↑ ΔP↑ y/o disminución de E↓ precipitan la la transición.
Perturbaciones infinitamente pequeñas de la velocidad dan lugar a la transición (caos, inestabilidad).
La resistencia para Re ≈ 2 107 es ≈ 10 veces mayor en régimen turbulento que en laminar:
Para Re ≈ 2 107 CD tur ≈ 10 CD lam
Los perfiles desarrollados matemáticamente al límite de máxima efectividad presenta el inconveniente de ser sensibles a mínimos cambios de Re↑ I↑ Ɛ↑ C↑ ΔP↑ E↓ debidos a imperfecciones, suciedad, insectos, etc. NO funcionando en el punto óptimo de diseño y siendo poco eficientes (como un piloto muy agresivo de F1 tipo Maldonado, Grossian, que van al límite de adherencia, superándolo, pasándose de frenada, trompeando o dándose un paseo por la hierba, siendo en definitiva poco eficientes).
